中科大CUDA编程
参考资料:
- CUDA C Programming Guide,中文翻译见here
- CUDA C++ Best Practice Guide
CPU体系架构概述
现代CPU架构和性能优化
CPU是执行指令和处理数据的器件,能完成基本的逻辑和算术指令。
指令
Example:
算术:add r3,r4 -> r4
访存:load [r4] -> r7
控制:jz end
对于一个编译好的程序,最优化目标: $$ \frac{cycle}{instruction}\times \frac{seconds}{cycle} $$ 总结来说,CPI(每条指令的时钟数)& 时钟周期,注意这两个指标并不独立。
摩尔定律
芯片的集成密度每两年翻一番,成本下降一半。
CPU的处理流程
取址 -> 解码 -> 执行 -> 访存 -> 写回
流水线
使用一个洗衣服的例子,单件衣服总时间 = wash(30min)+ dry(40min)+ fold(20min)
那么洗4件衣服需要的总时间 = 30 + 40 + 40 + 40 + 40 + 20 = 210min
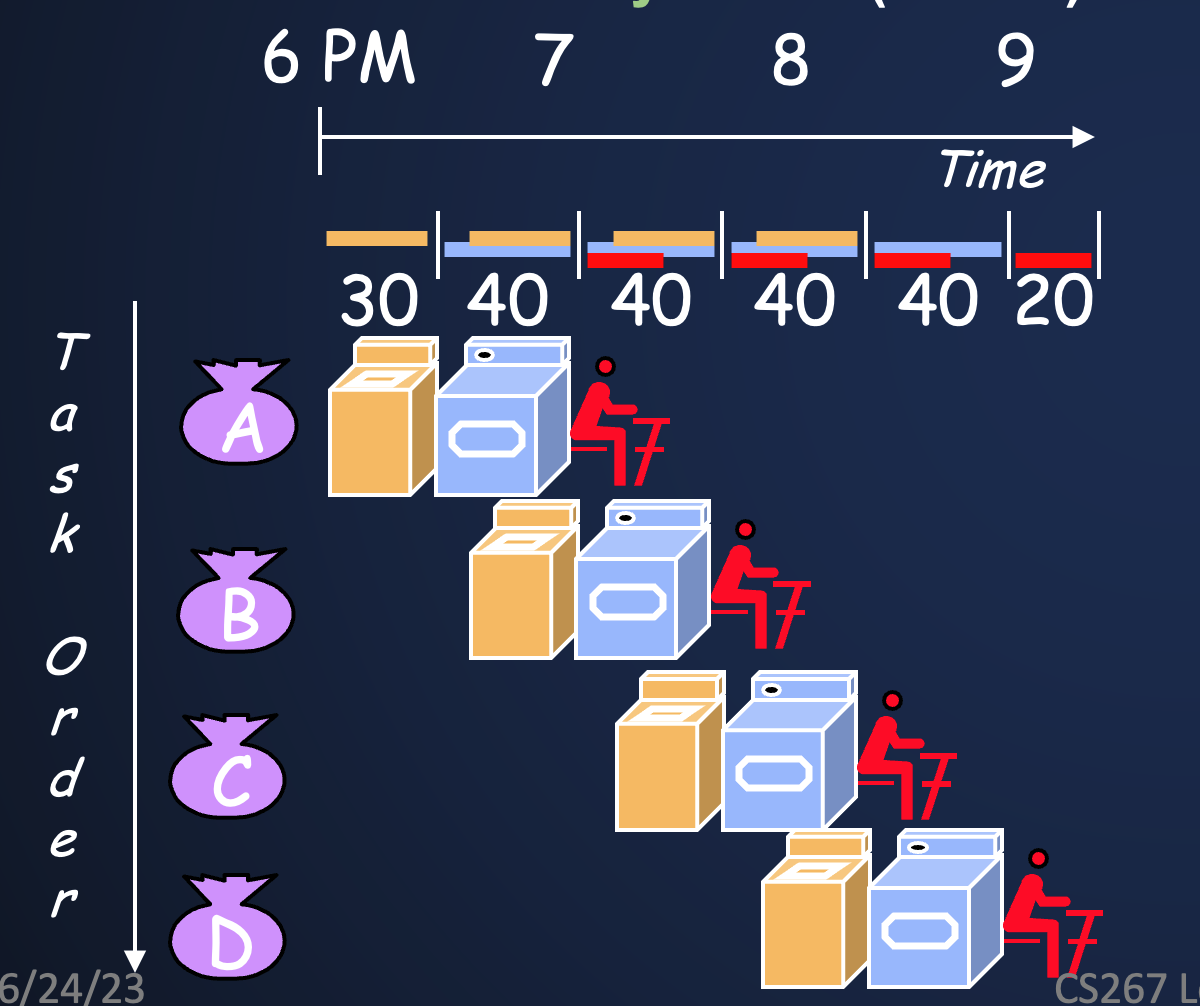
- 流水线使用的是指令级的并行,可以有效地减少时钟周期
- 增加了延迟和芯片面积(需要更多的存储)
- 带来了一些问题:具有依赖关系的指令处理,分支如何处理
旁路(Bypassing)
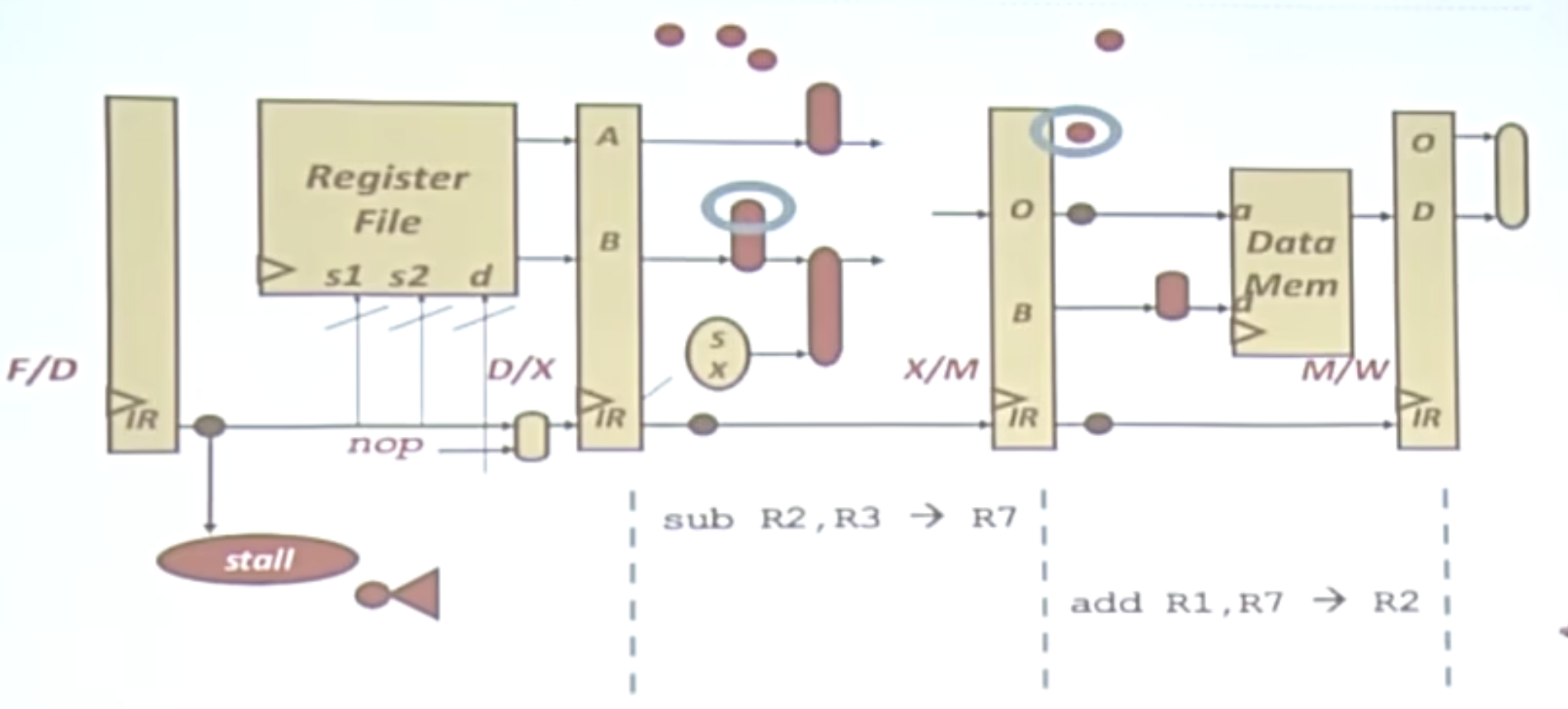
这里的两条指令具有依赖性,按照原来的方式,需要先计算R7的结果,再进行写回,访寸取到R7的结果。有了旁路这一功能,便可以跳过这个阶段,直接取到R7的结果。
流水线的停滞
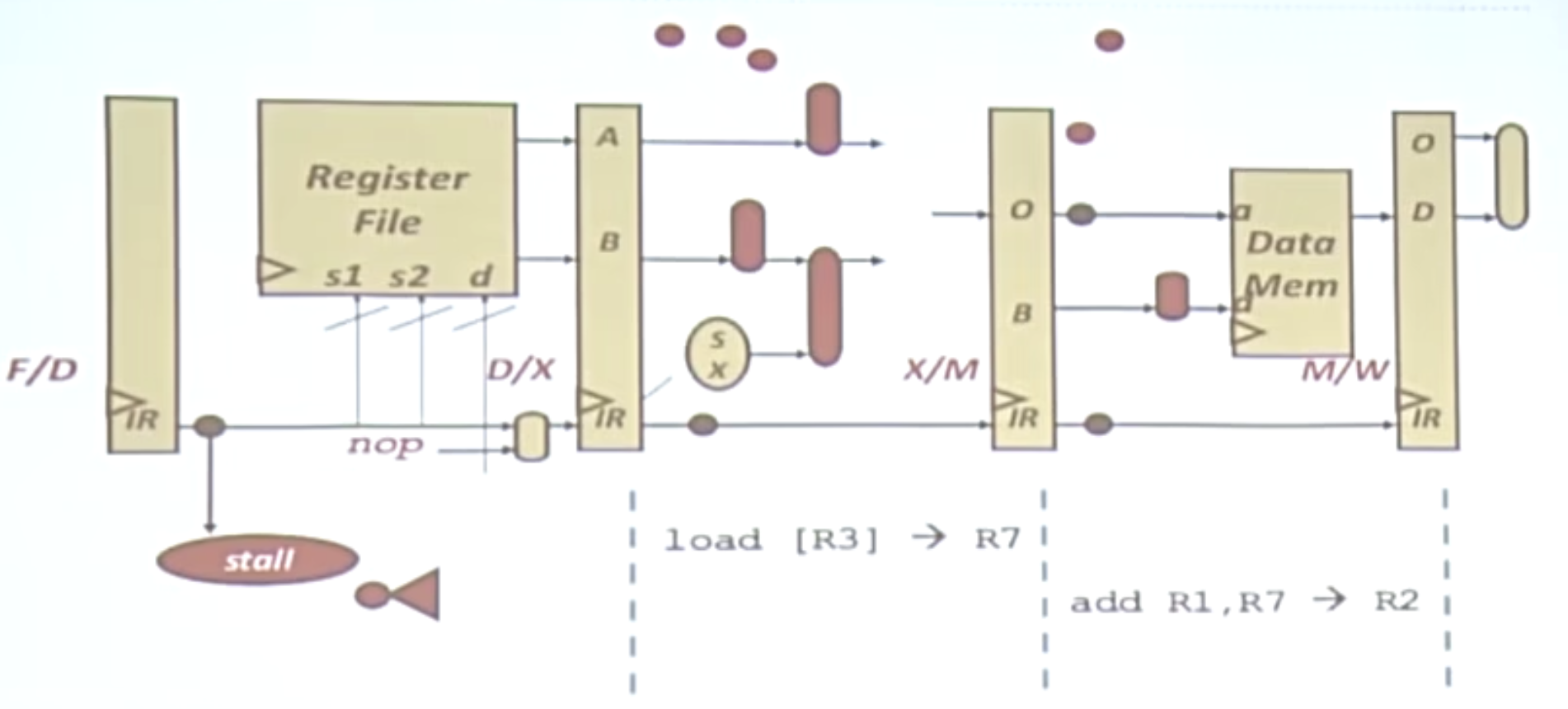
如果前面的load[R3]没有做完,流水线便会停滞。
分支
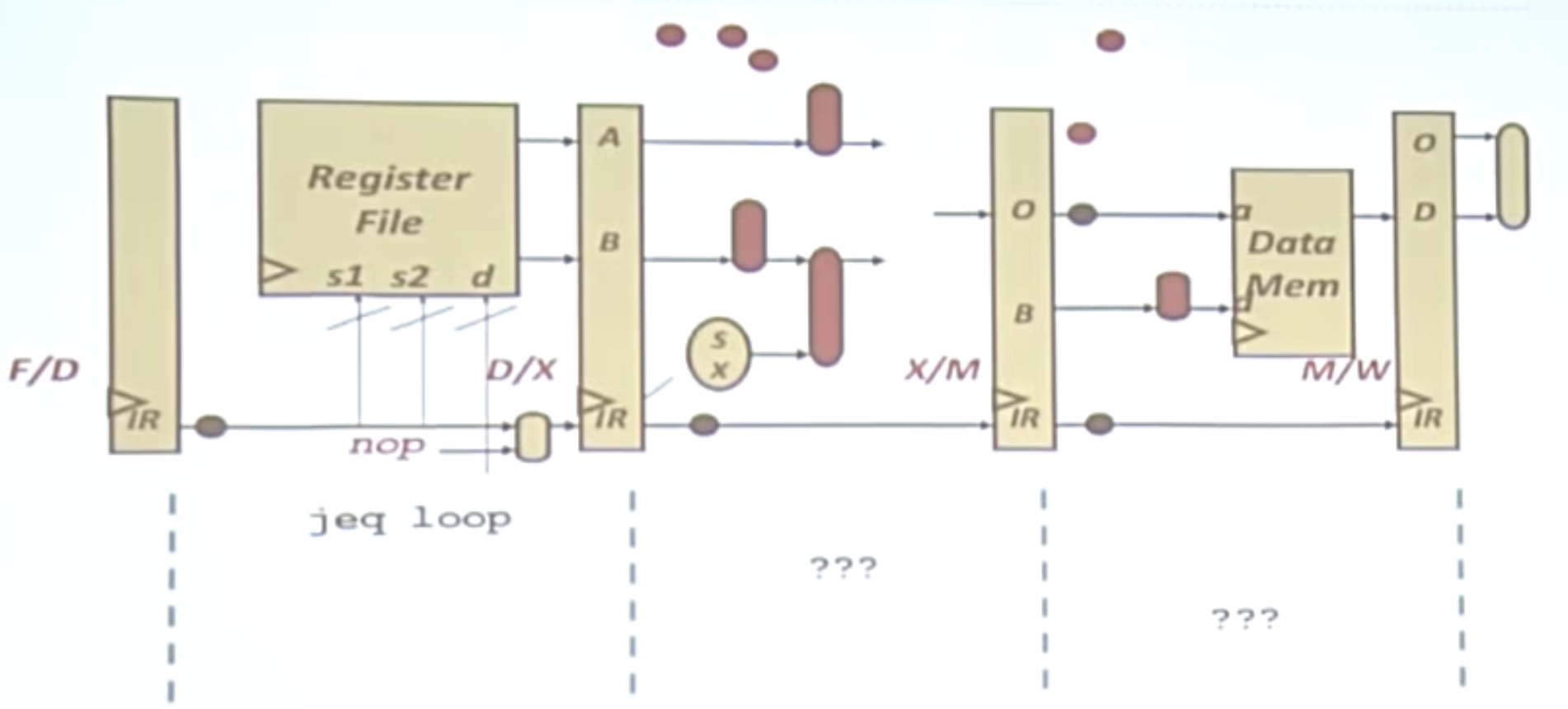
判断是否做循环jeq loop,我们并不知道是否要执行这个循环,计算机会通过分支预测等工作来进行处理。
具体的分支预测基于过去的分支记录,现代计算机的预测器准确率大于90%。同样它同样会增加芯片面积,增加延迟(预测的开销)。
分支断定
与分支预测不相同的是,它不再使用分支预测器,而是将所有分支都做一遍。
好处:不需要复杂的预测器,减少了芯片面积,减少了错误预测,在GPU中使用了分支断定。
增加CPU一个时钟周期能处理的指令数(IPC)
超标量——增加流水线的宽度,一个时钟周期处理多条指令。(超标量流水线将每个阶段细分为更小的微操作,并在多个功能单元上同时执行这些微操作。这样,多条指令可以在同一时钟周期内同时执行,从而提高处理器的吞吐量。)
这需要更多的寄存器和存储器带宽。
指令调度
考虑以下指令:
|
|
xor和add是相互依赖的(读后写)sub和addi相互依赖(读后写)xor和sub不依赖(写后写)
为了让程序运行地更快,可以使用替换寄存器的方法:
|
|
这样我们的xor和sub就可以并行执行了。
乱序执行
将所有的指令重排,使其顺序更合理。
- 重排缓冲区
- 发射队列/调度器
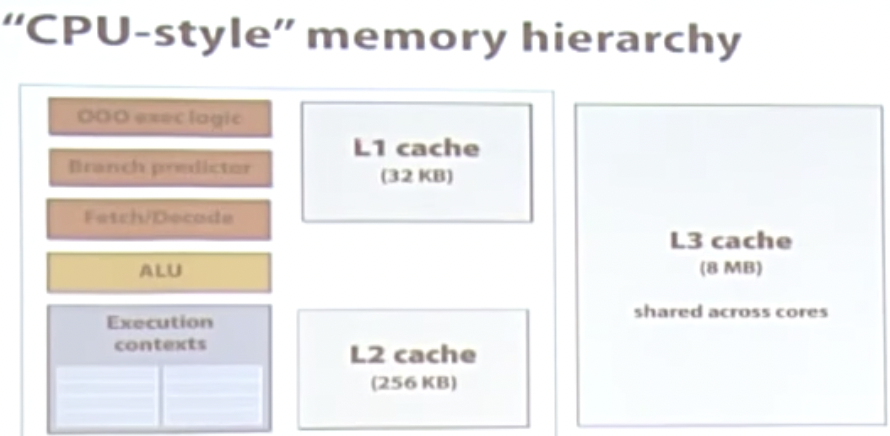
存储器架构/层次
存储器越大越慢。
缓存
利用时间临近性和空间临近性,可以使我们的处理变得更快。计算机一般有3级缓存,缓存的大小越来越大。
向量运算
|
|
可以使用单指令多数据(SIMD)进行加速。
|
|
x86的向量运算
- SSE:4宽度浮点和整数指令
- AVX:8宽度浮点和整数指令
线程级的并行
线程的组成:私有的寄存器、程序计数器、栈等。
程序员可以创建和线程,OS和程序员都可以对线程进行调度。
CPU的瓶颈
因为功耗墙的存在,处理器的单核性能的提升会越来越少,所以需要多核来支撑。
新摩尔定律
- 处理器越来越胖,核越来越多
- 单核的性能不会大幅提升
由此也带来了另外一堵墙,叫存储器墙,处理器的存储器带宽无法满足处理能力的提升。
并行程序设计概述
并行计算模式
并行计算是同时应用多个计算资源解决一个计算问题:
- 涉及多个计算资源或处理器
- 问题被分解为多个离散的部分,可以同时处理(并行)
- 每个部分可以由一系列指令完成
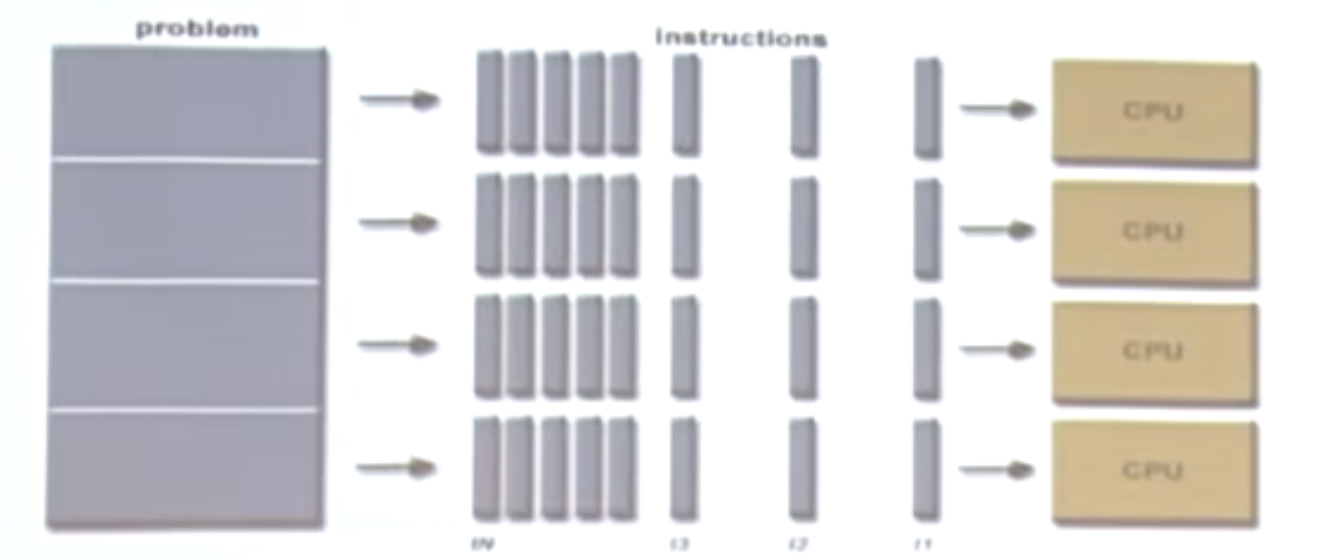
Flynn矩阵
| SISD | SIMD | MISD | MIMD |
|---|---|---|---|
| 单指令单数据 | 单指令多数据 | 多指令单数据 | 多指令多数据 |
在并行计算中,SIMD是一种很常见的方式。
常见名词
- Task:任务
- Parallel Task:并行任务,该任务可以由多个并行计算的方式解决的单个任务。
- Serial Execution:串行执行
- Parallel Execution:并行执行
- Shared Memory:共享存储
- Distributed Memory:分布式存储
- Communications:通信
- Synchronization:同步
- Granularity:粒度
- Observed Speedup:加速比,对比Baseline,并行计算能获得的性能提升。
- Parallel Overhead:并行开销
- Scalability:可扩展性
存储器架构
- 共享存储
- 分布式存储
- 分布式共享存储
并行编程模型
- 共享存储模型
- 线程模型
- 消息传递模型
- 数据并行模型
具体实例:OpenMP,MPI,Single Program Multiple Data(SPMD),Multiple Program Multiple Data(MPMD)。
Amadahl’s Law
Amadahl’s Law的程序可能的加速比取决于可以被并行化的部分。 $$ \text{speedup} = \frac{1}{1-p}\ p代表可以被并行化的部分\ \text{speedup} = \frac{1}{\frac{P}{N} + S}\ P代表并行部分,N代表处理器数,S代表串行部分。 $$
CUDA开发环境搭建和工具配置
由于该教程是14年的教程,环境配置和如今已经完全不同,这部分将会在我的博客上呈现。
GPU体系架构概述
GPU架构
GPU是一个异构的多处理器芯片,为图形图像处理进行优化。
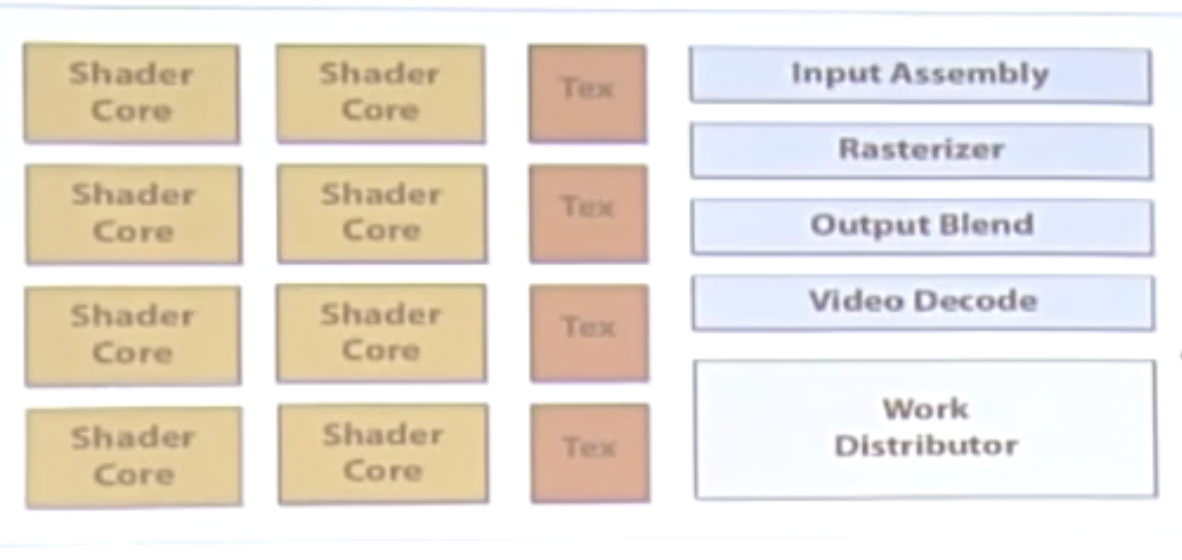
Shader core代表渲染器的核心,其组成是一个基本的ALU计算单元。
将GPU的执行单元拎出来,其结构如下:

从上到下分别是地址译码单元、计算核心、执行上下文。
现代的GPU中的ALU都共享指令集,那么为了提高效率,我们一般就通过增大ALU和SIMD来增进并行性,方便向量化的操作。
GTX480的单个架构的SM(流多处理器),一个流多处理器包含32个CUDA核心(CUDA核心本质为一个ALU):

整个GTX480显卡可以同时承载23000个CUDA片元(也叫CUDA线程)。
GPU的存储架构
CPU存储架构
GPU的存储架构
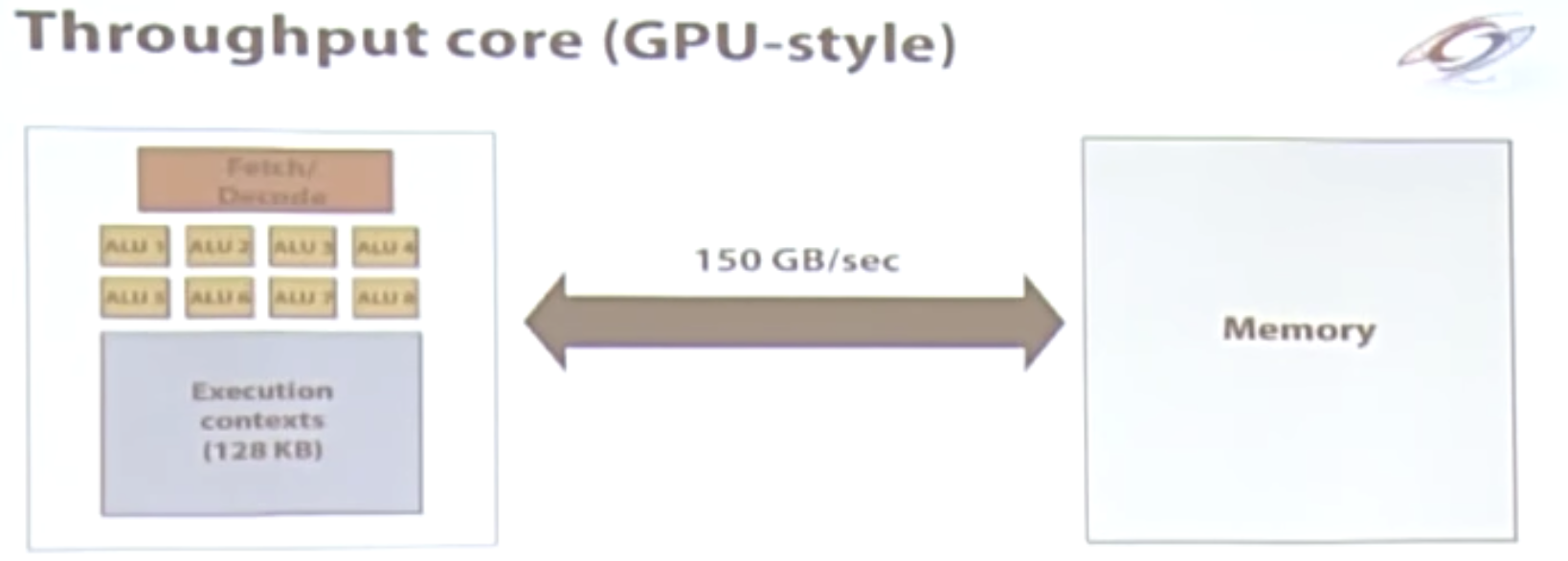
GPU的存储是交给了专门的较大的存储,显存,带宽可以达到150GB/s。访存的带宽资源是非常宝贵的资源!
看一个带宽测试的例子
$$ A、B、C为三个矩阵。\ 计算 D = A\times B + C $$
上述计算需要5个步骤:
1.Load input A[i]
2.Load input B[i]
3.Load input C[i]
4.计算A[i] * B[i] + C[i]
5.存储结果到D [i]中
如果这时候的矩阵是非常大的矩阵,那么上述几个步骤,最大的开销则发生在前3步,那么计算的效率是非常低的,这里的瓶颈是带宽。
现代的GPU通过缓存来缓解带宽受限的情况:
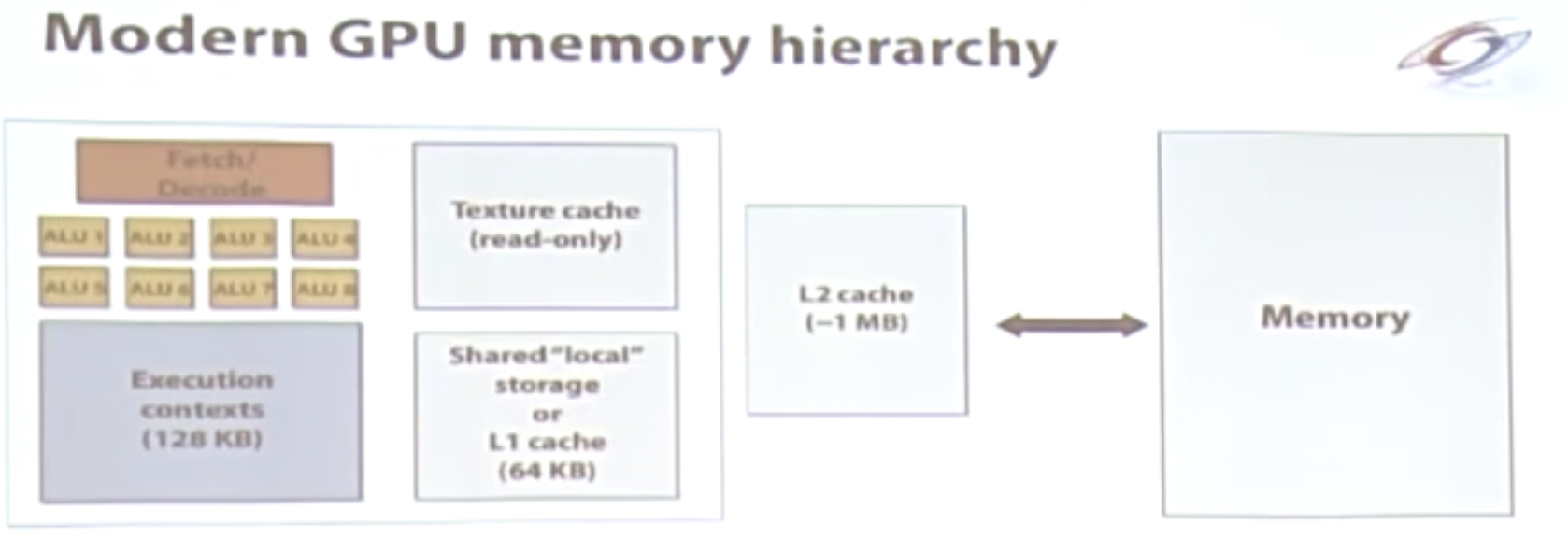
总结一下GPU是异构、众核的处理器,针对吞吐优化。
高效的GPU任务具备的条件
- 具有成千上万的独立工作
- 尽量利用大量的ALU计算单元
- 大量的片元(CUDA thread)切换掩藏延迟
- 可以共享指令流
- 适用于SIMD处理
- 最好是计算密集的任务
- 通信和计算开销比例合适
- 不要受制于访存带宽
CUDA/GPU编程模型
CPU和GPU互动模型
cpu和gpu的交互
- cpu和gpu有各自的物理内存空间
- 它们之间通过PCIE总线相连(8G/s~16G/s)
- 交互的开销较大
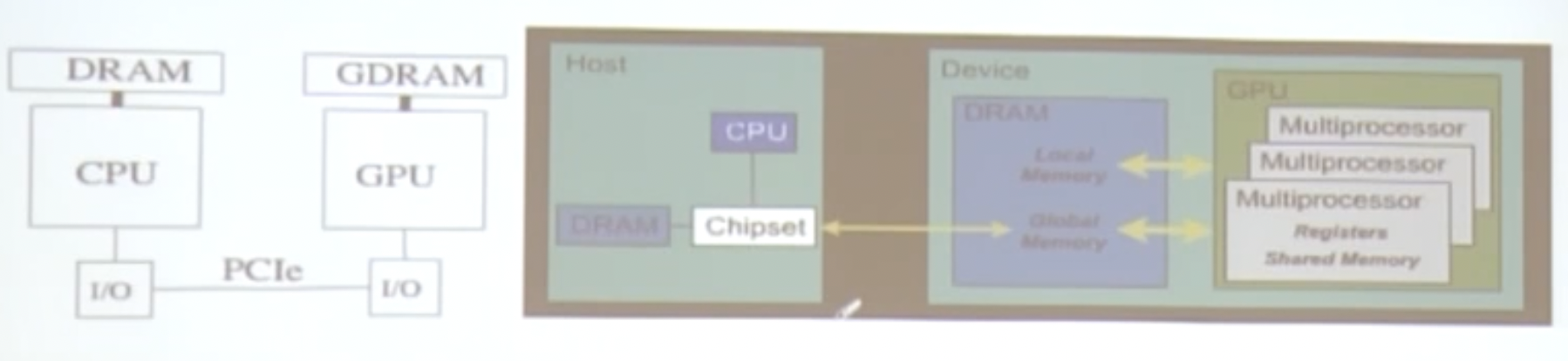
gpu的存储架构

访存速度的高低
从高到低,DRAM代表物理位置在显存中:
- Register(寄存器)- 延迟约为1个时钟周期
- Shared Memory(共享存储)- 延迟约为1个时钟周期
- Local Memory(DRAM)- 在每一个私有的线程装配的一个memory,如果寄存器放不下则装入这里,(在物理上放在显存中)速度相对较慢。
- Global Memory(DRAM)- 真正的显存,速度相对较慢
- Constant Memory(DRAM)- 相对Global和Local更慢
- Texture Memory(DRAM)- 相对Global和Local更慢
- Instruction Memory(invisible, DRAM)
GPU的线程组织模型
GPU的线程模型主要就是网格、块、线程,如下图:

注意上述示意图为软件逻辑上的组织,并不代表硬件层次。
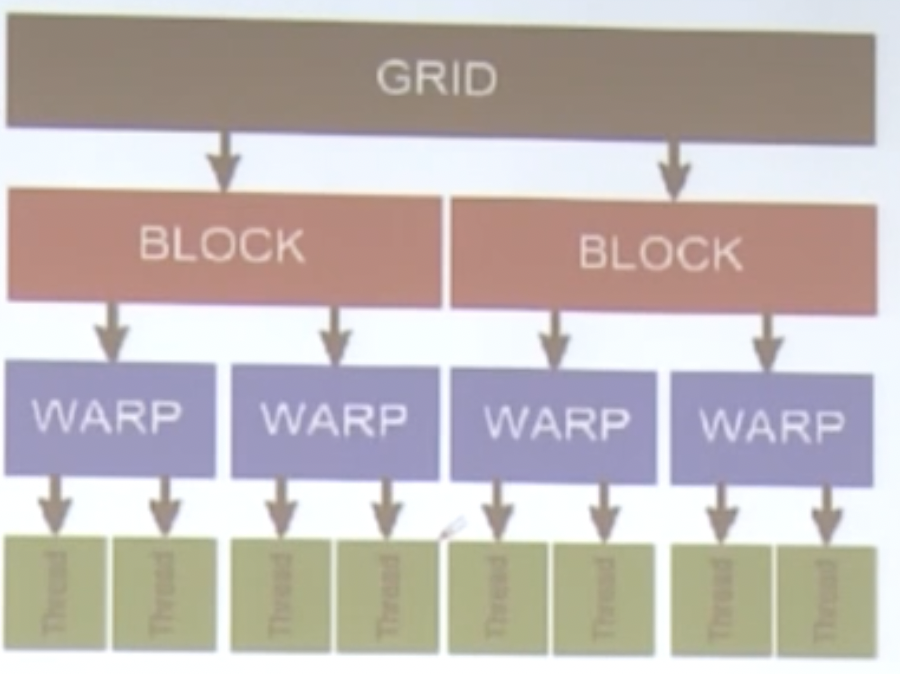
WARP代表线程束,是一些线程的组成,一般由32个连续的线程组成。
一个Kernel(通常是在GPU上执行的单个程序)具有大量的线程,这些线程被划分为多个线程块(Blocks),一个Block内部共享Shared Memory,这些Block可以进行同步。
线程和线程块具有唯一的标识。
GPU存储模型
gpu内存和线程的关系
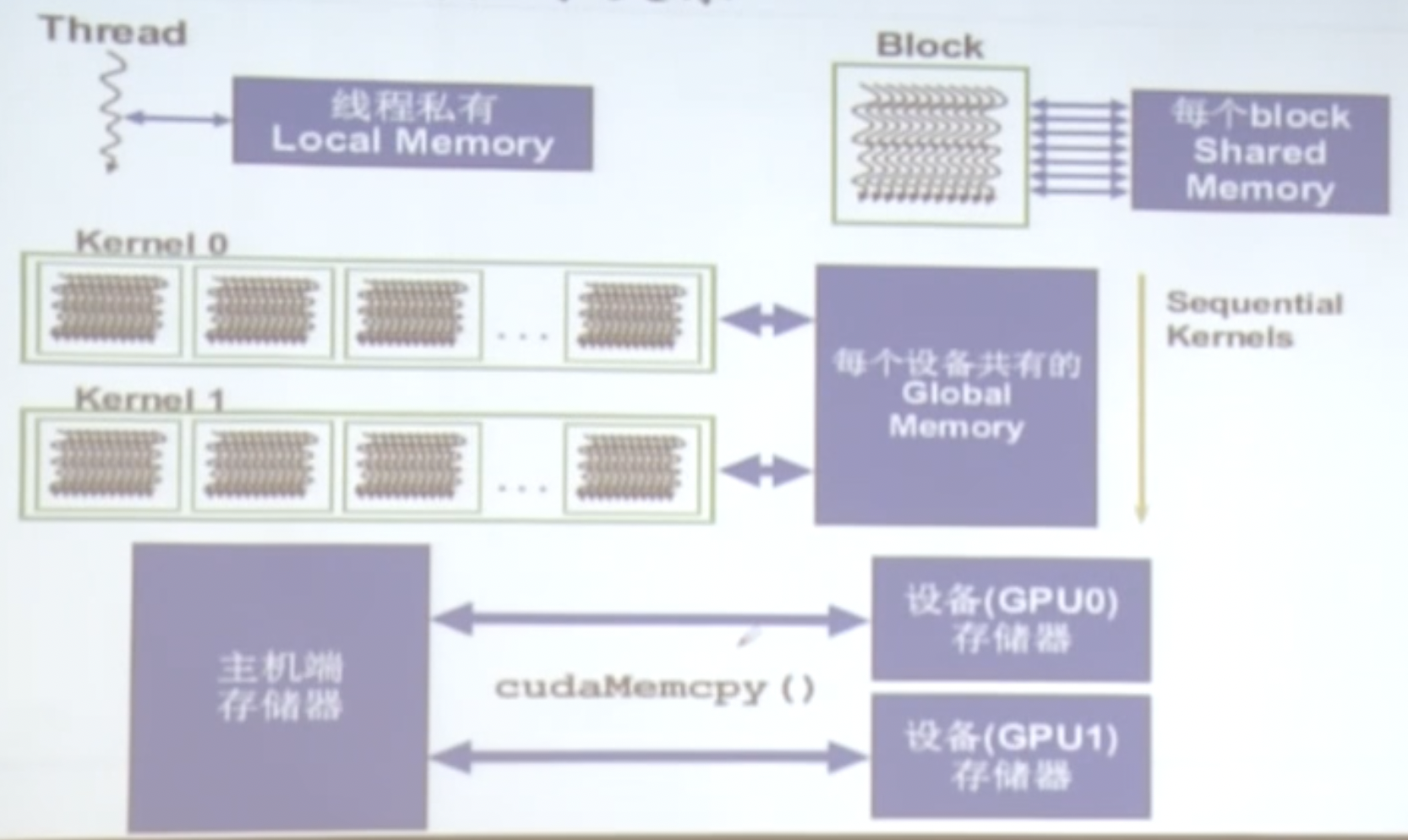
- 每个线程有一个私有的
Local Memory - 每个Block有多个线程,它们共享
Shared Memory - 整个设备拥有一个
Global Memory - 主机端的存储器可以跟不同的设备进行交互
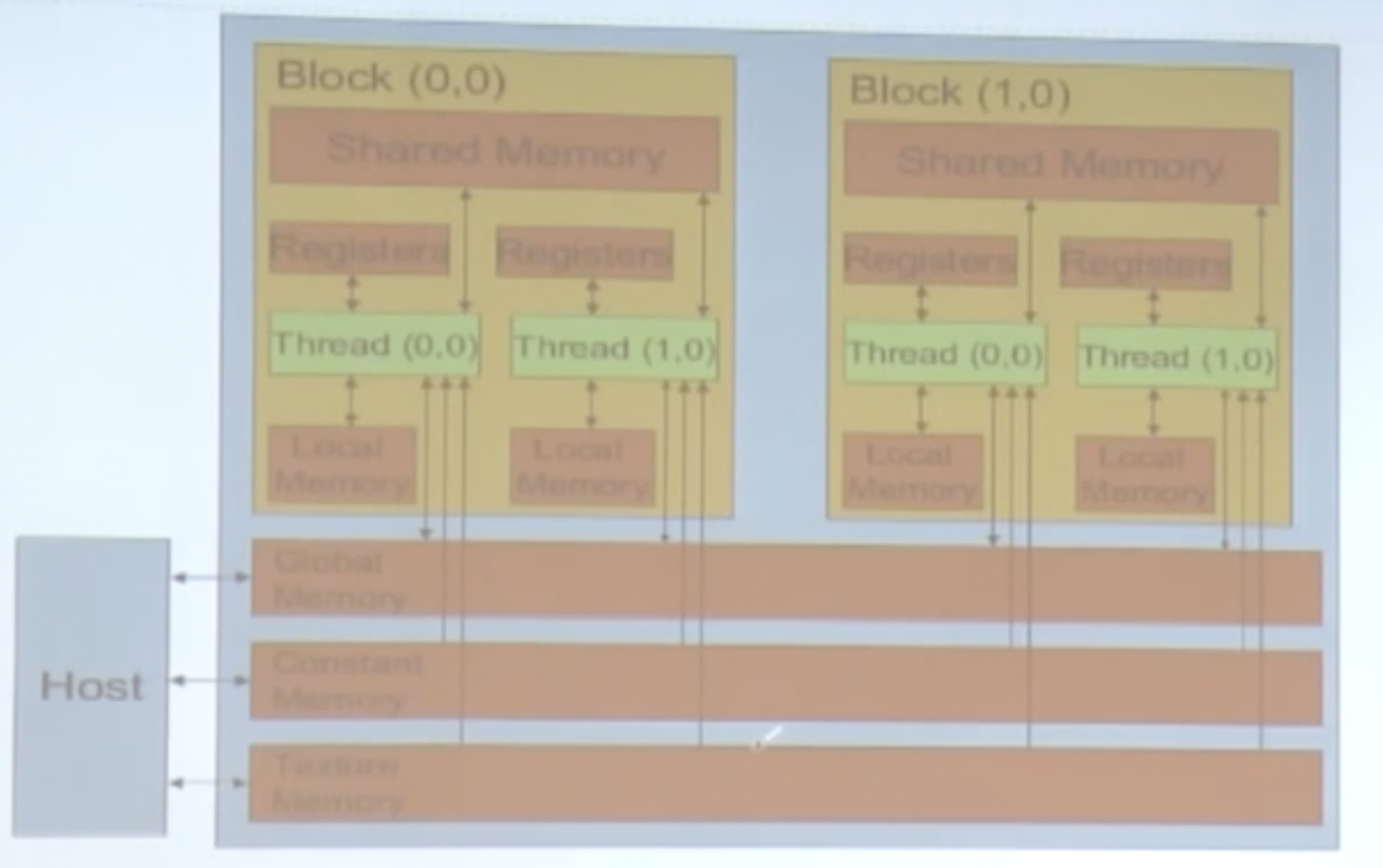
上图代表了GPU端Block内部的访问流程。
编程模型
常规的GPU用于处理图形图像,操作于像素,每个像素的操作都类似,可以应用SIMD(单指令多数据)。
SIMD可以认为是数据并行的分割:
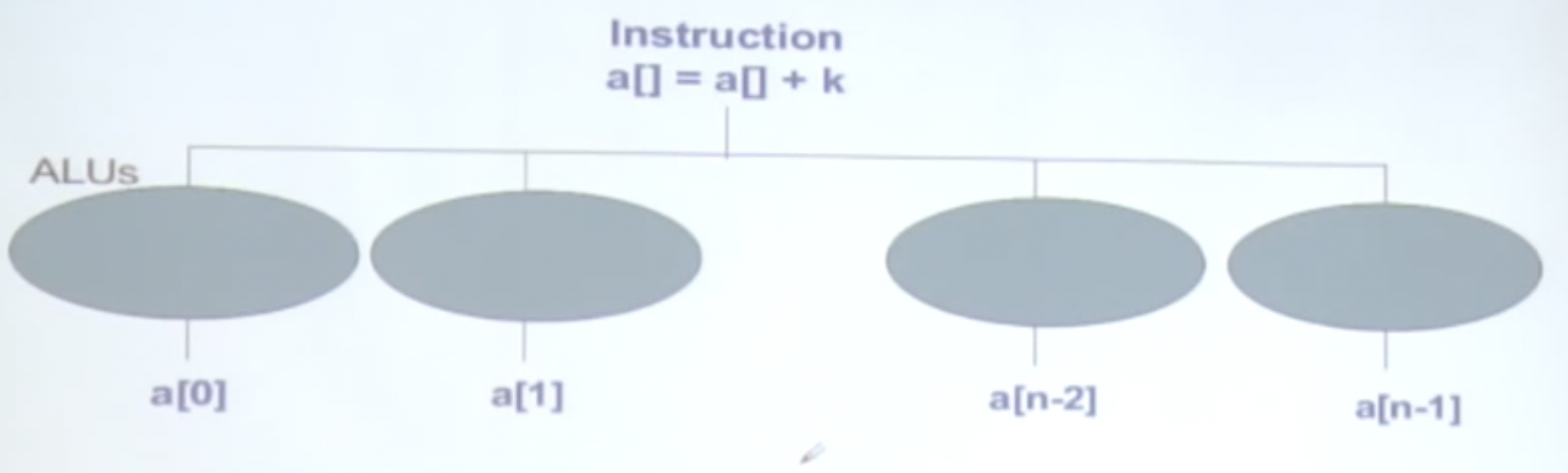
在GPU中,它被称为是SIMT:
通过大量的线程模型获得高度并行,线程切换获得延迟掩藏,多个线程执行相同的指令流,GPU上大量线程承载和调度。
CUDA编程模式:Extended C
- 修饰词:global,device,shared,local,constant
- 关键词:threadIdx,blockIdx
- Intrinsics:__syncthreads
- 运行期API:Memory,symbol,execution,management
- 函数调用:例子
convolve<<<100, 10>>> (参数)
CUDA函数声明
| 执行位置 | 调用位置 | |
|---|---|---|
| __device__ float DeviceFunc() | Device | Device |
| __global__ void kernelFunc() | Device | Host |
| __host__ float HostFunc() | Host | Host |
几个需要理解的点:
- 入口函数,CPU上调用,GPU上执行
- 必须返回void
- __device__ 和__host__可以同时使用
CUDA编程(1)
CUDA术语
- Host:主机端,通常指cpu
- Device:设备端,通常指gpu
- Host和Device有各自的存储器
- Kernel:数据并行处理函数,也就是所谓的
核函数,类似于OpenGL的shader - Grid:一维或多维线程块
- Block:一组线程
一个Grid的的每个Block的线程数都是一样的,Block内部的每个线程可以进行同步,并访问共享存储器。
线程的层次
一个Block可以是一维,二维,甚至是三维的。(例如,索引数组、矩阵、体)
- 一维Block:Thread ID == Thread Index
- 二维Block:(Dx,Dy)
Thread ID of index(x, y) == x + y Dx
- 三维Block:(Dx,Dy,Dz)
Thread ID of index(x, y, z) == x + y Dx + z Dx Dy
看一个代码的例子:
|
|
一个线程块里的线程位于相同的处理器核,共享所在核的存储器。
- 块索引:blockIdx
- 块的线程数:blockDim(一维,二维,三维)
使用多个Block进行矩阵的Add:
|
|
线程层次结合gpu存储层次加深对代码操作的硬件理解
- Device Code:
– 读写每个线程的的寄存器
– 读写每个线程的local memory
– 读写每个线程块的shared memory(线程块内线程共享)
– 读写每个grid的global memory(不同线程块的所有线程共享)
– 只读每个grid的constant memory(每个grid的步态变化的独立空间)
- Host Code:
– 主机端只能读写global和constant memory,global memory代表全局的存储器,constant memory代表常量的存储器。
CUDA内存传输
- cudaMalloc():在设备端分配global memory
- cudaFree():释放存储空间
分配的代码示例:
|
|
- cudaMemcpy():内存传输,Host->Host, Host->Devicel, Device->Device, Device->Host
示例程序:
|
|
矩阵相乘
- CPU实现:
|
|
- CUDA算法框架,三步走:
|
|
- GPU的矩阵相乘的Kernel函数:
|
|
上述矩阵相乘的样例特点:
1.每个线程计算结果矩阵Pd的一个元素。
2.每个线程需要读入矩阵Md的一行,读入矩阵Nd的一列,并为每对元素执行一次乘法和加法。(访存的次数和计算的次数基本接近1:1)
3.矩阵的长度受限于一个线程块允许的线程数目。
思考:在算法实现中最主要的性能问题是什么?
主要的性能问题其实存在于访问存储的开销,所以算法的速度主要取决于访存的带宽(从Global Memory读数据的速度)。
CUDA编程(2)
内置类型和函数
- __global__:主机上调用,设备上执行。返回类型必须是
void。 - __device__:在设备上调用,在设备上执行。
- __host__:在主机上调用,在主机上执行。
Global和device函数
-
尽量少用递归
-
不要使用静态变量
-
少用malloc
-
小心通过指针实现的函数调用
CUDA内置的向量的数据类型
- Example:
- char[1~4],uchar[1~4]
- short[1~4],ushort[1~4]
- int[1~4],uint[1~4]
- long[1~4],ulong[1~4]
- longlong[1~4],ulonglong[1~4]
- float[1~4]
- double1,double2
- 同时适用于host和device的代码,通过函数
make_<type name>构造:
|
|
- 通过
.x,.y,.z和.w来访问:
|
|
常用的数学函数
- 开根号函数:
sqrt、rsqrt - 指数函数:
Exp、log - 三角函数:
sin、cos、tan、sincos - 进/舍位函数:
trunc,ceil,floor
cuda中还提供了一些内建的数学函数,比上面这些函数速度更快,但精度要低一些,适合于那种对精度要求不高,但运算速度要求比较高的场合,这些函数都以双下划线__开头:__expf、__logf、__sinf、__powf等
线程同步
块内线程可以同步
- 调用
__syncthreads创建一个barrier栅栏 - 每个线程在调用点等待块内线程执行到这个地方,然后所有线程继续执行后续指令:
|
|
线程同步带来的问题
线程同步会带来部分线程的暂停,线程同步可能还会带来更严重的问题,死锁:
|
|
线程调度
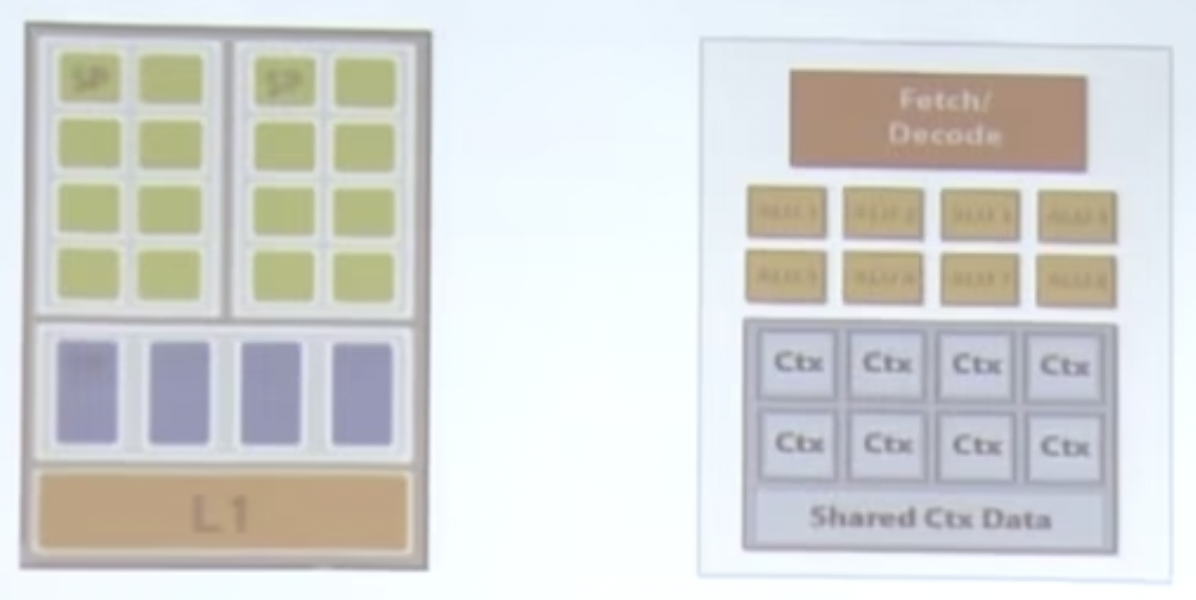
左边是一个的流多处理器(SM)的物理结构,右边为其逻辑结构。
一个绿色的小块为一个流处理器(SP),在这个GPU(古老)中,8个SP组成一个SM。
Warp:块(Block)内的一组线程
- 一个Warp有32个线程。
- 运行于同一个SM,是线程调度的基本单位。
- threadIdx值连续。
- 硬件上保证了一个Warp内的线程是天然同步的。
一个例子:
|
|
-
在一个硬件上,warp的调度是0开销的!原因是一个warp需要的资源(上下文)在硬件结构上是不变的,只需要进行warp的切换。使用现实生活举例就是一个饭桌是固定的,只需要切换吃饭的那一伙人就OK。
-
在一个SM上,任一时刻只有一个warp在执行
如果一个warp内的线程沿着不同的分支执行会有什么后果?
这种情况为divergent warp,在不同的执行分支下,所有的warp的执行顺序是统一的,比如先执行if里面的内容,再执行else的内容。
假设一个SM中只有8个SP,那么如何给线程分配SP?
按照构想,其实也就是轮流使用的过程:warp内的32个线程按照8个线程一批的形式轮流使用SP。
存储模型
寄存器
每个SM内部的寄存器对线程来说是竞争模型。
假设一个SM内部有8000个寄存器,768个线程,那么每个线程能分配到10个寄存器。超出限制后线程数将因为block的减少而减少。
Example:每个线程用到了11个寄存器,并且每个block含256个线程,那么一个SM可以驻扎多少个线程,一个SM可以驻扎多少个warp?warp数变少了意味着什么?
768/256 = 3, 原本可以分配3个block,但是由于寄存器数量不够用,最多只能分配给512个线程。 那么线程数就会减少到512个,属于2个block,一个SM只能有512/32 = 16个。warp数量的减少意味着效率的降低,剩余的寄存器也会闲置。
局部存储器(Local Memory)
**局部存储器是存储于global memory(显存),作用域是每个thread,是线程私有的空间。**一般用于存储自动变量数组,通过常量索引访问,速度较慢。
共享存储器(Shared Memory)
其存储层次和cache是同一等级的,用户可进行编程,速度较快。
全局存储器(Global Memory)
全局存储器其实就是显存,长延时,可读写。如果是随机访问会非常影响性能,Host主机端可以读写。
常量存储器(Constant Memory)
短延时,高带宽,当所有线程访问同一位置时只读。存储于global memory但是有缓存,Host主机端可以读写,经常用于存储常量。
那么如何去声明这些变量呢?
| 变量声明 | 存储器 | 作用域 | 生命期 |
|---|---|---|---|
| 必须是单独的自动变量 | register | thread | kernel |
| 自动变量数组 | local | thread | kernel |
| __shared__ int sharedVar; | shared | block | kernel |
| __device__ int globalVar; | global | grid | application |
| __constant__ int constantVar; | constant | grid | application |
变量的访问
-
global和constant变量:
-
Host可以通过以下函数访问:
cudaGetSymbolAddress():找到要访问变量的地址cudaGetSymbolSize():得到访问变量的大小cudaMemcpyToSymbol():将数据从Host内存复制到Device内存中的一个常量符号(Symbol)位置。cudaMemcpyFromSymbol():将数据从Device内存中的一个常量符号位置复制回到Host内存中 -
Constans变量必须在函数外声明
-
CUDA编程(3)
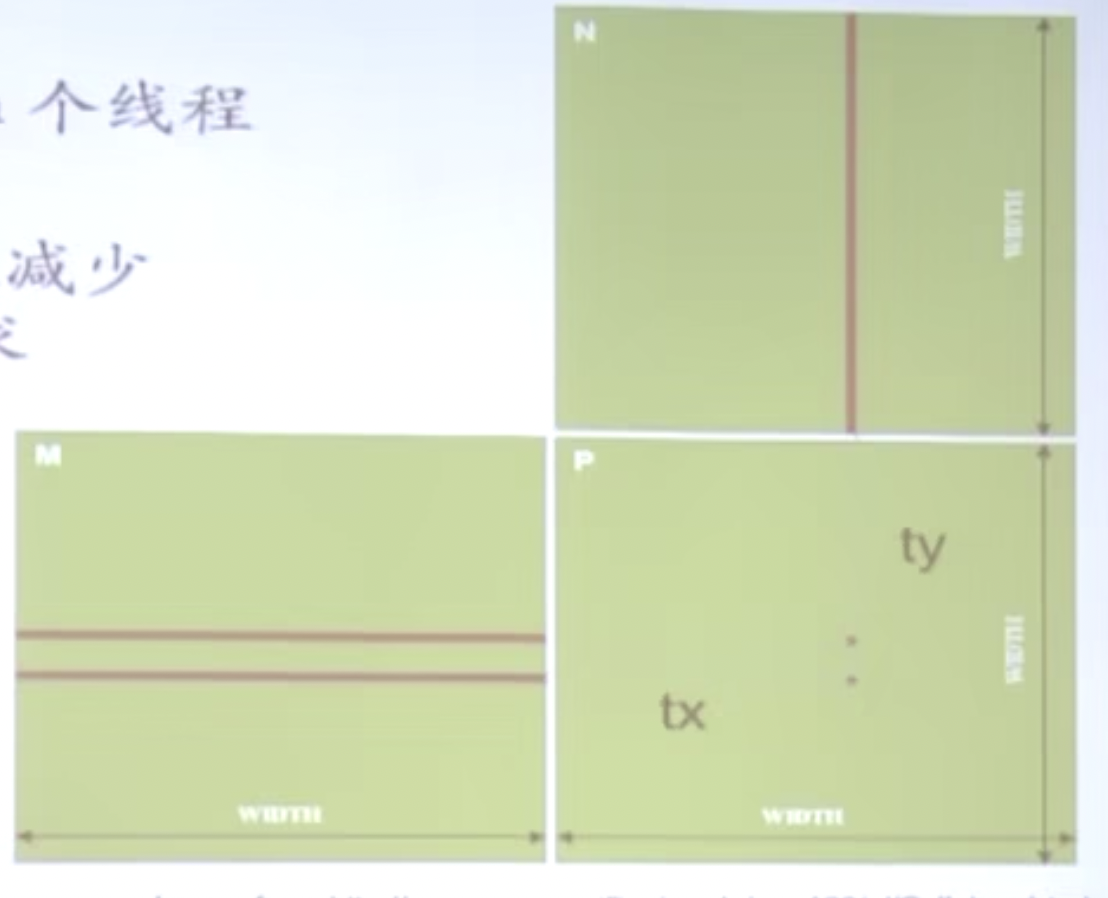
矩阵乘法重分析
为了去除长度的限制,一般优化的做法就是将Pd矩阵拆成tile小块,把一个tile布置到一个block上,并通过threadIdx和blockIdx索引。
修改后的代码如下:
|
|
CUDA中的索引和矩阵索引是如何做的?
对于CUDA的global memory来说,没有二维数组的功能,所以行优先与列优先是无所谓。所以在GPU的Global级别编程里没有交换循环顺序带来性能提升的说法。但是在CUDA的shared memory中,默认是按照行优先来计算的。所以变换成列优先会有很大的性能提升。
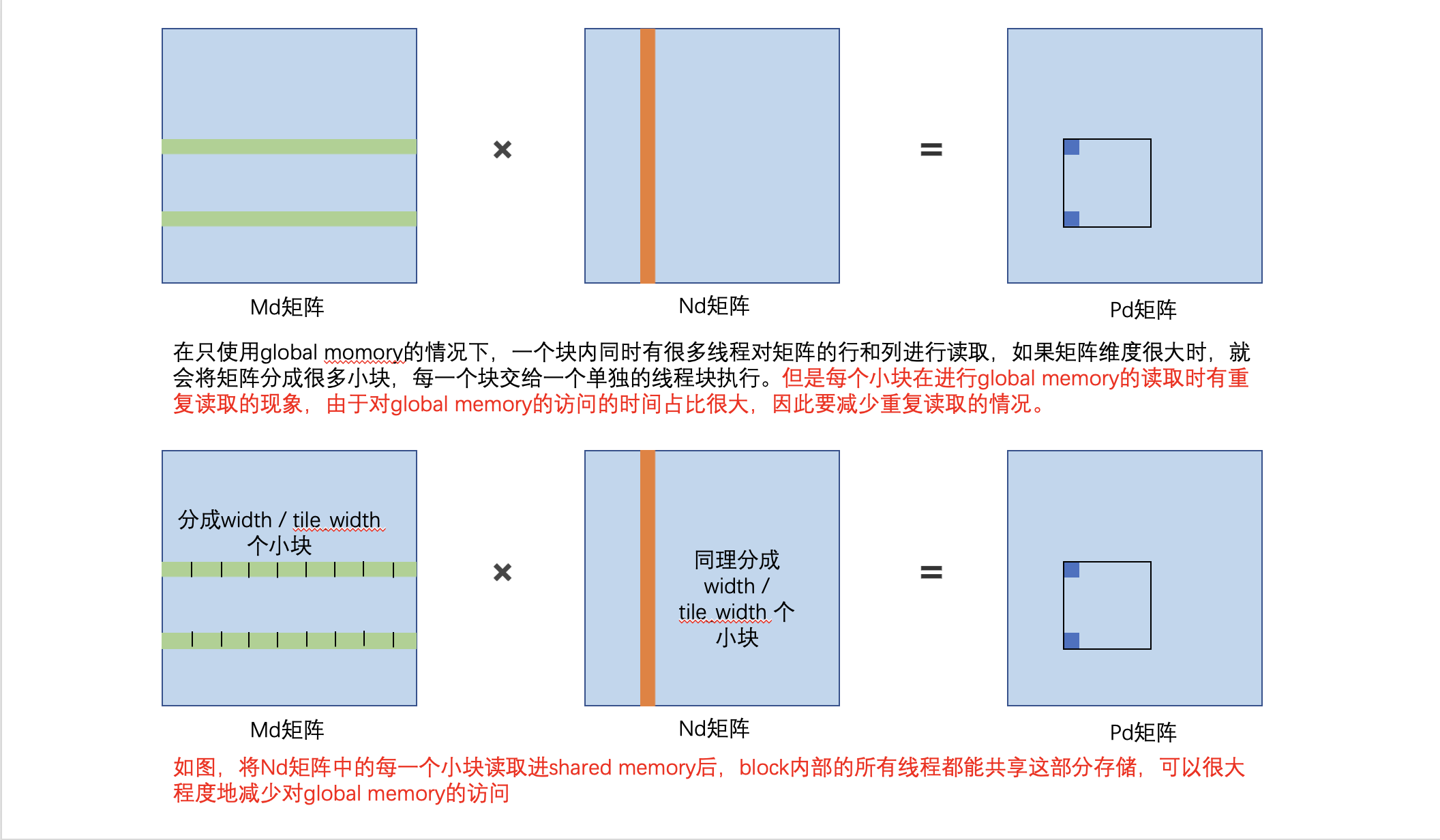
对于矩阵相乘时,Global memory的访问开销占大部分的时间,如何减少访问带来的消耗?
其实我们在做矩阵乘法的时候,有很多重复的读取:
在两个位置进行计算的时候,读取的是同一列的数据,多了很多重复读取。
- 解决方法是每个输入元素被Width个线程读取,使用shared memory来减少global memory带宽需求:
将Kernel函数拆分成多个阶段,每个阶段使用Md矩阵和Nd矩阵的子集累加Pd矩阵,这样每个阶段都有很好的数据局部性。
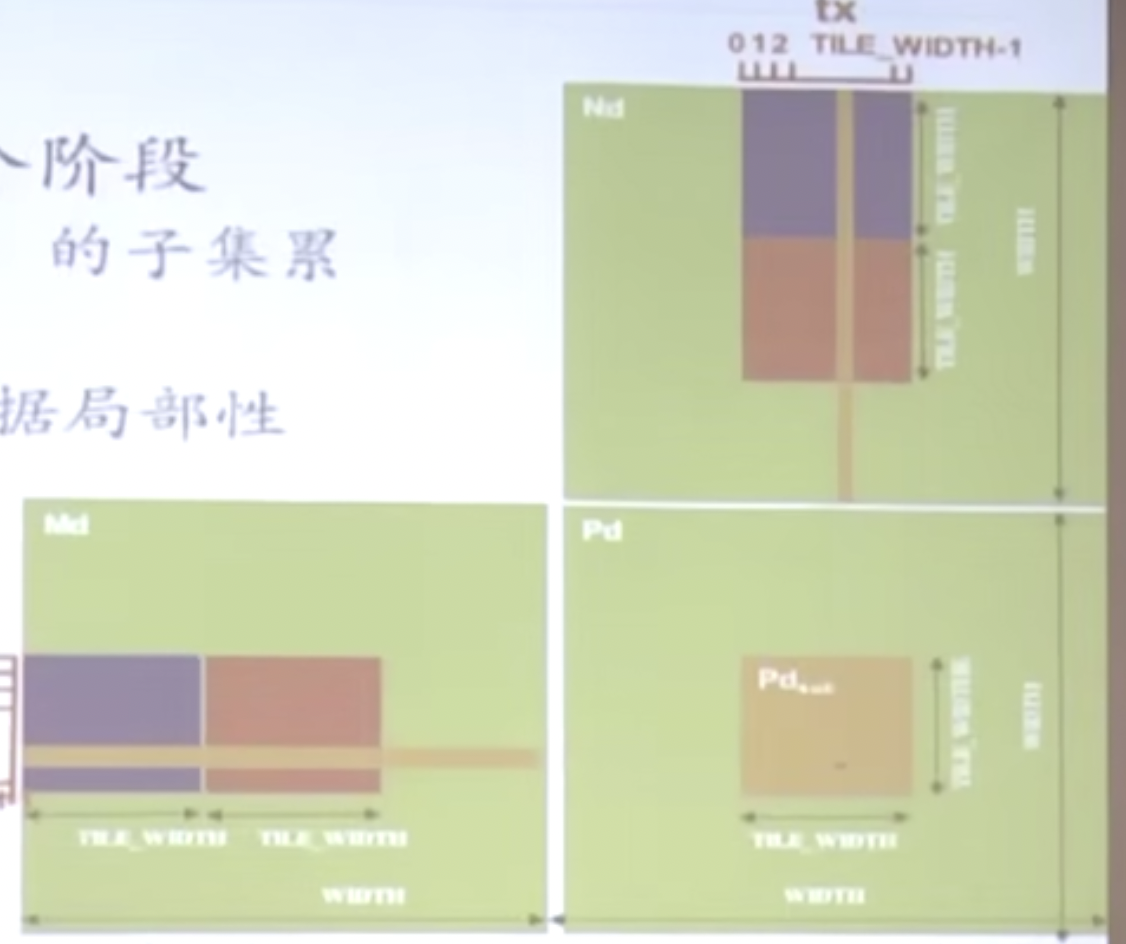
但由于shared memory的大小是有限的,我们将条块读取也需要分批读取。
代码如下:
|
|
上述程序整体的流程:
- 计算结果矩阵Pd中元素的row和col来确定要取Md的哪一行,哪一列。
- 根据行列将其分为一个个小块,分别把小块放入Shared Memory
- 在Shared Memory进行计算
- 这里的同步体现在每一个小块上的读取是可以并行的,为O(1)。而且可以有效减少对global memory的访问次数
那么如何选取TILE_WIDTH的数值
一个块内的线程数是有上限的,TILE_WIDTH的数目不要大于BLock内部的线程数,同时Shared Memory大小是有极限的。更大的TILE_WIDTH将导致更少的Block数。
原理如图所示:
原子函数
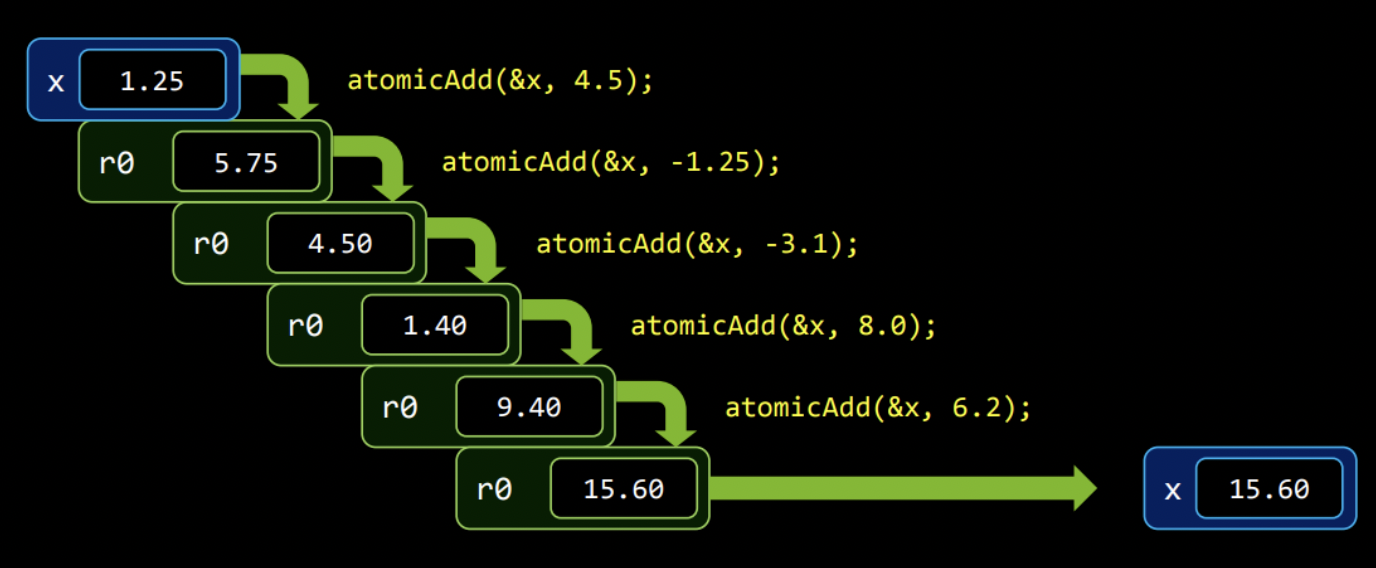
CUDA中的原子操作本质上是让线程在某个内存单元完成读-修改-写的过程中不被其他线程打扰,它是一个独占的过程。
举个例子来说:我有很多线程,每个线程计算出了一个结果, 我需要把所有的结果加在一起,就必须使用原子操作,不然就会发生错误。因为可能会发生一个线程正在读,另一个线程正在写的过程。所以就需要一个原子加的操作过程,如下图:
- 算术运算:
atomicAdd(),atomicSub(),atomicExch(),atomicExch(),atomicMin(),atomicMax(),atomicDec(),atomicCAS() - 位运算:
atomicAnd(),atomicOr,atomicXor()
这些原子函数具体的作用可以参考CUDA原子操作详解及其适用场景 - 知乎 (zhihu.com) 原子操作是比较耗时的,需要进入一个排队机制,尽量少用。
CUDA程序基本优化
有效的数据并行算法 + 针对GPU架构特性的优化 = 最优性能
Parallel Reduction:并行规约
下面是一个并行规约的过程:

也就是每两个数进行一次合并!
GPU程序如下:
|
|
以8个数为例,每次我们启动8个线程读取,在做加法时,实际上工作的线程只有4个线程,由于同步的需求,多余的线程就闲置了。
也就是说n个元素实际上只需要n/2个线程,也就是说每轮所需要的线程数都减半!

按照上图的方式,我们可以通过改变索引来实现这个需求,那么我们stride的顺序从1,2,4变为了4,2,1:
|
|
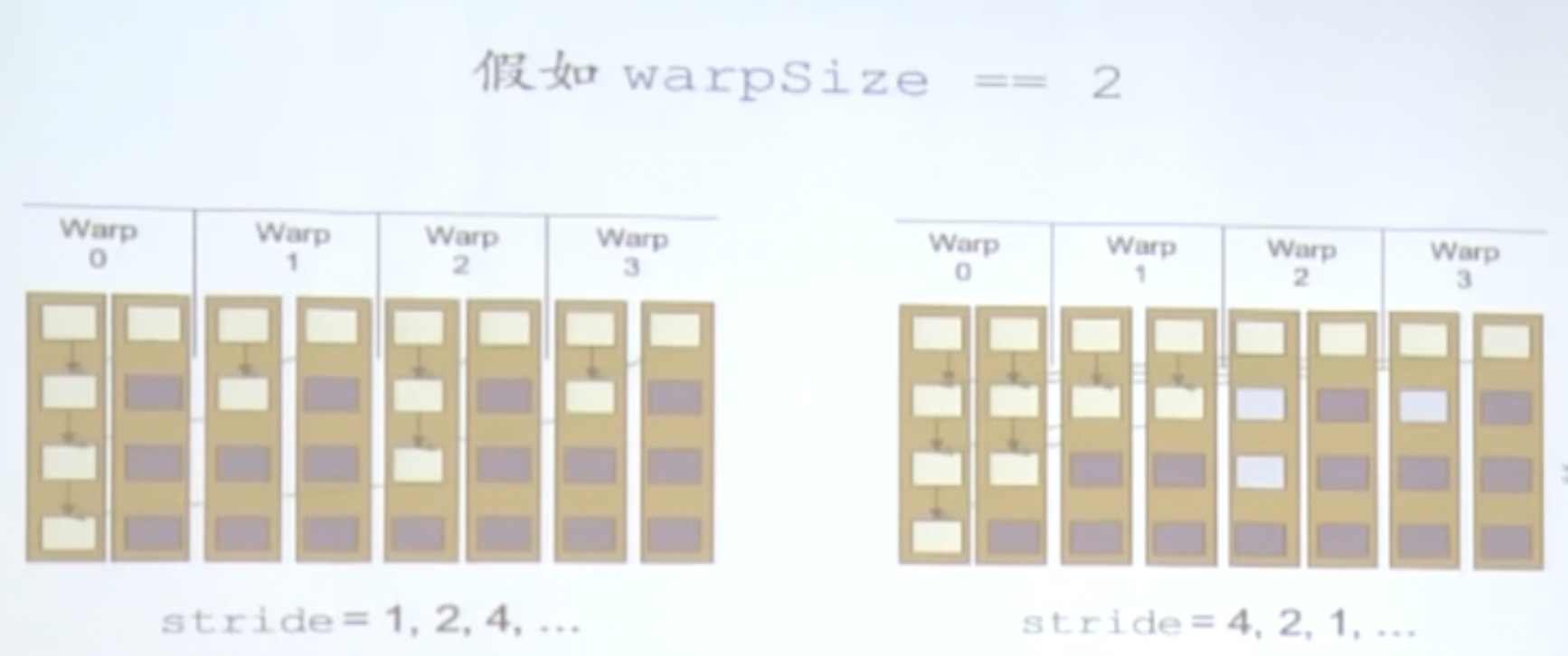
因为线程进行计算的方式进行了改变,因为warp是线程调度的基本单位,这样的排列方式可以让更多闲置的线程可以提前释放资源。
Warp分割
线程块内如何划分warp
通晓warp分割有助于减少分支发散,让warp尽早完工。
- Block被划分为以32个连续的线程组叫一个warp
- warp是最基本的调度单位
- warp一直执行相同的指令
- 每个线程只能执行自己的代码路径
- 设备切换没有时间代价
CUDA程序深入优化
访存造成的延迟
CPU-GPU数据传输最小化
Host <--> Device的数据传输带宽远低于global momory- 减少这种传输的方法:
- 1.中间数据直接在GPU分配,操作,释放
- 2.部分代码在GPU内部重复计算的开销可能比总线(pcie)传输的开销更大
- 3.如果将CPU代码移植到GPU,但是这个中间传输的过程还在,可能无法提升性能(此时中间传输的开销大于GPU计算的开销)
- 组团传输
- 大块传输的性能好于小块
- 内存传输与计算时间重叠
- 双缓存解决
Memory Coalescing:访存合并
这被认为是最重要的影响因子!
GPU的Global memory的带宽虽然很高,但是延时是很高的。
带宽和延时的理解:
带宽可以比喻为高速公路上的宽度,允许多少数据同时经过;延时可以比喻为在高速公路上开车的速度。
问题:给定一个矩阵用行优先的方式存储于global memory,对一个thread来说比较适合的访存模式是什么?
如果满足访问存储合并条件(相邻的线程访问相邻的内存),一个warp的线程访问Global memory的32、64或128位宽数据,结果只需要1或者2次传输。
**Shared Memory **:
- 比global memory快上百倍
- 可以通过缓存数据减少global memory的访存次数
- 线程可以通过shared memory协作
- 用来避免不满足合并条件的访存:
- 读入shared memory重排顺序,从而支持合并寻址。
Shared Memory架构
- 很多线程访问存储器
- 因此存储器被划分为banks
- 连续的32-bit访存被分配到连续的banks
- 每个bank每个周期可以响应一个地址
- 如果有多个bank的话可以同时响应更多的地址申请
- 对同一个bank进行多个并发访存将导致bank冲突
- 冲突的访存必须串行执行
Bank冲突
下面两种是不会发生bank冲突的内存访问方式:
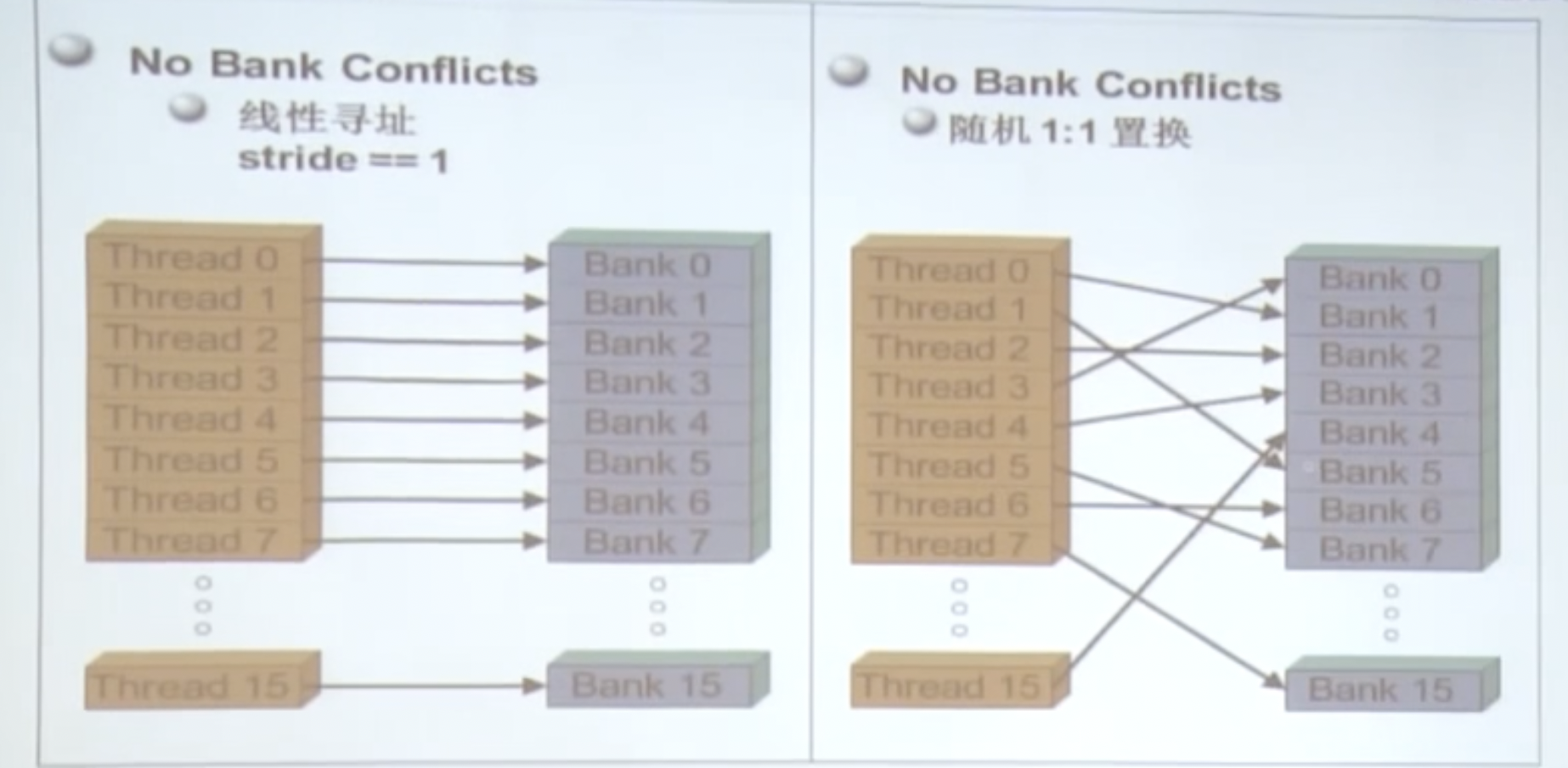
下面两种是容易发生bank冲突的内存访问方式:

一般来说,多少路的bank冲突就会导致多少倍的性能下降。
- 通常来说,没有bank冲突shared memory和registers一样快。
- warp_serialize profiler分析器的可以反映冲突
- 快速情况:
- half-warp内所有线程访问不同的banks,没有冲突
- half-warp内所有线程读取同一地址,没有冲突(广播)
- 慢速情况:
- Bank Conflict:half-warp内多个线程访问同一个bank
- 访存必须串行化
- 代价 = 多个线程同时访问同一个bank的线程数的最大值
举例:Transpose 矩阵转置
- 每个线程块在矩阵的一个warp上操作
- 原始版本存在对global memory按步长访问的情况
原始矩阵转置:
|
|
通过shared memory实现合并
- 先将warp的多列元素存入shared memory,再以连续化的数据写入global memory
- 需要同步__syncthreads(),因为线程需要用到其他线程存储到
shared memory的数据。
代码如下:
|
|
现在还存在一个问题:
- warp内的16$\times$16个floats存在于shared memory:
- 列中的数据存于相同的bank
- 读入warp – 列数据存在16路的bank conflict
- 解决方案 – 填充shared memory数组
__shared__ float tile[TILE_DIM][TILE_DIM + 1]- 反对角线上的数据存于相同的bank
使用Padding避免存储体冲突(填充数组),见下图:
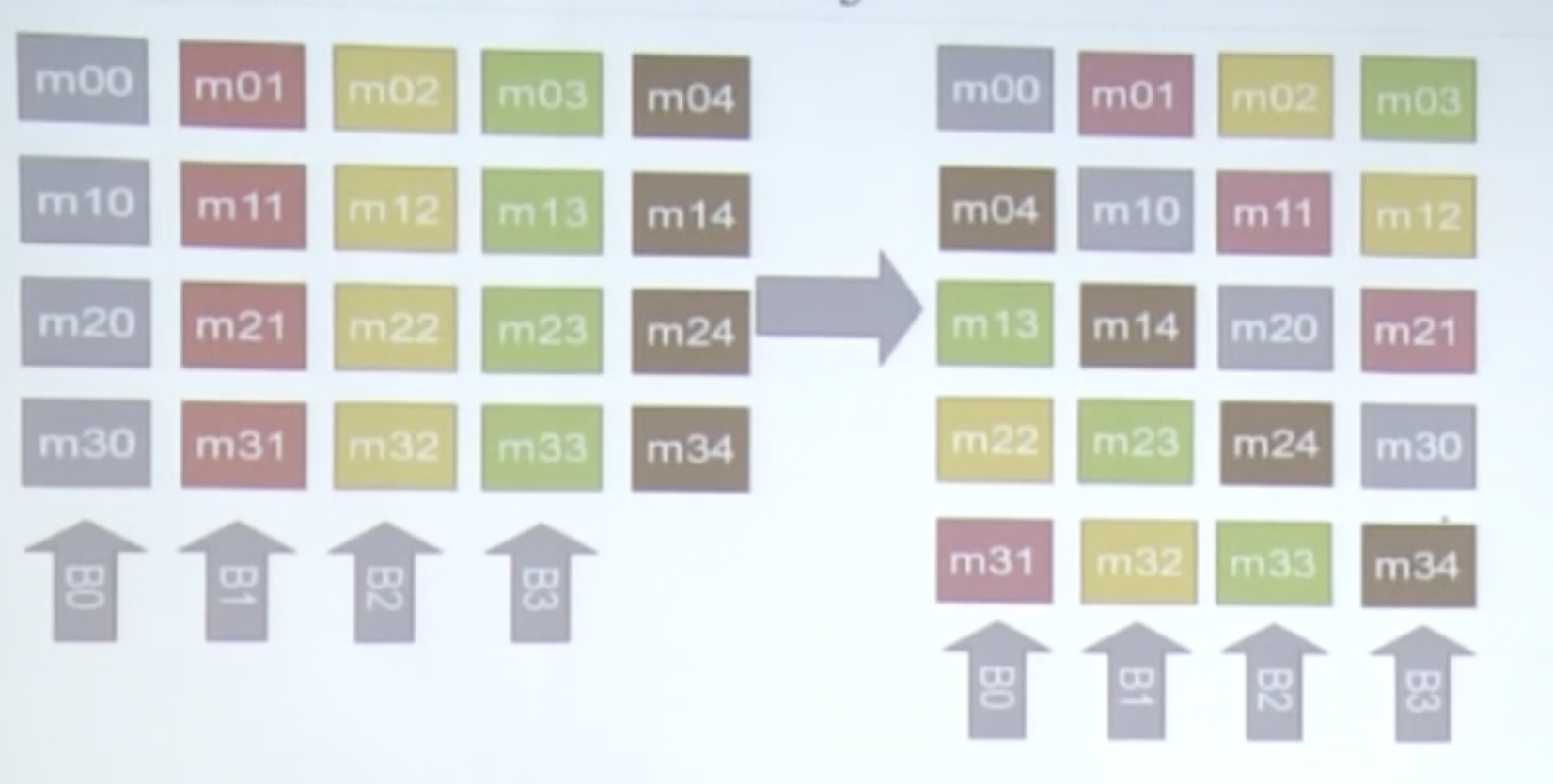
原来假设为4个bank,现在填充数组的时候多填充一位,但由于bank是按顺序读取,那么棕色的部分就会占位,但不会产生作用。所以Bank读取时不会产生冲突。
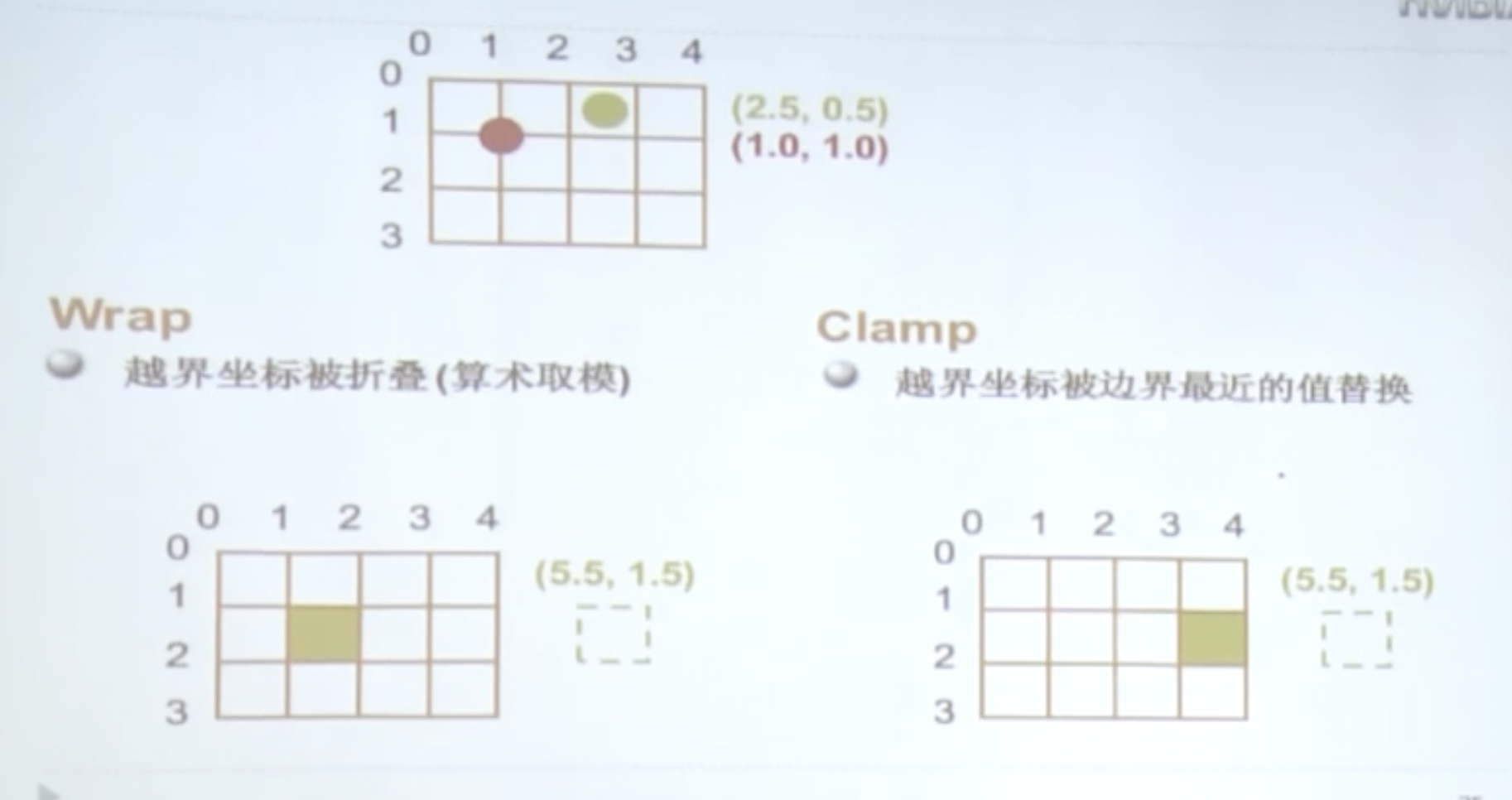
CUDA的Texture纹理
Texture是读入数据的一个对象。
优点:
- 数据被缓存:特别适用于无法合并访存的场合
- 支持过滤:线性、双线性、三线性 插值
- Wrap模式(针对越界寻址):裁剪到边缘或重复
- 一维、二维、三维寻址:以整数或归一化小数做为坐标
Texture代码请查看《CUDA c program》
GPU硬件在数据的并行计算问题上,怎样可以达到很好的性能?
- 有效利用并行性
- 尽可能合并内存访问
- 利用shared memory
- 开发其他可存储空间(Texture、Constant)
- 减少bank冲突
SM资源动态分割
SM资源分配使用木桶原理。谁的资源先达到瓶颈则减少该部分资源的分配。
例子:
假设我们有768个线程(3个block),每个线程用10个寄存器。然而寄存器的大小最多只支持10个寄存器,如果此时每个线程分配11个寄存器,那么可使用的寄存器数量不够,则会自动减少block数量,变为512个线程(2个block),每个线程使用的11个寄存器,剩余的线程就会变为空闲状态。
数据预读
在一次global memory读操作和实际用到这个数据的语句中间,插入独立于以上数据的指令,可以隐藏访问延迟(并行)。
|
|
引入预读操作的瓦片化matrix multiply
|
|
指令混合
计算密集型任务很容易受限于带宽,典型的情况就是在存储器和执行配置优化完成后,考虑指令优化。
比如:
除以2^n,采用>>n
以2^n求模,采用&(2^n - 1)
避免double到float的类型自动转换
循环展开
example:
|
|
虽然这条语句只是单纯的循环计算,但是系统需要做很多额外的操作。
改成:
|
|
去掉循环的好处:不再有循环计数器更新,不再有分支,常量索引(不再有地址运算)。
编译自动实现:
|
|
缺点:可扩展性不强
最后修改于 2023-08-08

本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可。