1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
382
383
384
385
386
387
388
389
390
391
392
393
394
395
396
397
398
399
400
401
402
403
404
405
406
407
408
409
410
411
412
413
414
415
416
417
418
419
420
421
422
423
424
425
426
427
428
429
430
431
432
433
434
435
436
437
438
439
440
|
import cv2 as cv #OpenCV
import matplotlib.pyplot as plt #图表
import numpy as np #矩阵处理
import random
# 显示图像
def cv_show(name, img):
cv.imshow(name, img)
cv.waitKey(0)
cv.destroyAllWindows()
# 随机噪声
def random_noise(img, n):
'''
添加随机噪点(实际上就是随机在图像上将像素点的灰度值变为255即白色)
:param image: 需要加噪的图片
:param noise_num: 添加的噪音点数目,一般是上千级别的
:return: img_noise
'''
#
# 参数image:,noise_num:
img_noise = img
noise_num = 3000 * n
rows, cols, chn = img_noise.shape
# 加噪声
for i in range(noise_num):
x = np.random.randint(0, rows)#随机生成指定范围的整数
y = np.random.randint(0, cols)
img_noise[x, y, :] = 255
return img_noise
# 高斯噪声
def noise_Gauss(img, loc=0, scale=0.005):
"""
添加高斯噪声
:param img: 输入灰度图像
:param loc: 高斯均值
:param scale: 高斯方差
:param scale**2:高斯标准差
:return: img:加入高斯噪声后的图像
"""
img = np.float32(img) / 255 # (0-255)->(0-1)
Gauss_noise = np.random.normal(loc, scale ** 0.5, img.shape)
img = img + Gauss_noise # 加性噪声
if img.min() < 0:
low_clip = -1
else:
low_clip = 0
img = np.clip(img, low_clip, 1.0) # 约束结果在(0-1)
img = np.uint8(img * 255) # (0-1)->(0-255)
return img
# 椒盐噪声
def pepper_and_salt(img,percentage):
num=int(percentage*img.shape[0]*img.shape[1])# 椒盐噪声点数量
random.randint(0, img.shape[0])
img2=img.copy()
for i in range(num):
X=random.randint(0,img2.shape[0]-1)#从0到图像长度之间的一个随机整数,因为是闭区间所以-1
Y=random.randint(0,img2.shape[1]-1)
if random.randint(0,1) ==0: #黑白色概率55开
img2[X,Y] = (255,255,255)#白色
else:
img2[X,Y] =(0,0,0)#黑色
return img2
# 非局部均值的子函数
def arraycompare(array1, array2, height, width):
resultarray = np.zeros((height, width))
for row in range(0, height):
for col in range(0, width):
resultarray[row, col] = max(array1[row, col], array2[row, col])
return resultarray
# 非局部均值算法的子函数
def integralImgSqDiff2(paddedimg_val, Ds_val, t1_val, t2_val):
lengthrow = len(paddedimg_val[:, 0])
lengthcol = len(paddedimg_val[0, :])
Dist2 = (paddedimg_val[Ds_val:-Ds_val, Ds_val:-Ds_val] -
paddedimg_val[Ds_val + t1_val:lengthrow - Ds_val + t1_val,
Ds_val + t2_val:lengthcol - Ds_val + t2_val]) ** 2
Sd_val = Dist2.cumsum(0)
Sd_val = Sd_val.cumsum(1)
return Sd_val
# 非局部均值算法
def nl_meansfilter(imagearray, h_=10, ds0=2, ds1=5):
height, width = imagearray[:, :, 0].shape[:2]
length0 = height + 2 * ds1
length1 = width + 2 * ds1
h = (h_ ** 2)
d = (2 * ds0 + 1) ** 2
imagearray_NL = np.zeros(imagearray.shape).astype('uint8')
for i in range(0, 3):
paddedimg = np.pad(imagearray[:, :, i], ds0 + ds1 + 1, 'symmetric')
paddedimg = paddedimg.astype('float64')
paddedv = np.pad(imagearray[:, :, i], ds1, 'symmetric')
paddedv = paddedv.astype('float64')
average = np.zeros((height, width))
sweight = np.zeros((height, width))
wmax = np.zeros((height, width))
for t1 in range(-ds1, ds1 + 1):
for t2 in range(-ds1, ds1 + 1):
if t1 == 0 and t2 == 0:
continue
Sd = integralImgSqDiff2(paddedimg, ds1, t1, t2)
SqDist2 = Sd[2 * ds0 + 1:-1, 2 * ds0 + 1:-1] + Sd[0:-2 * ds0 - 2, 0:-2 * ds0 - 2] - \
Sd[2 * ds0 + 1:-1, 0:-2 * ds0 - 2] - Sd[0:-2 * ds0 - 2, 2 * ds0 + 1:-1]
SqDist2 /= d * h
w = np.exp(-SqDist2)
v = paddedv[ds1 + t1:length0 - ds1 + t1, ds1 + t2:length1 - ds1 + t2]
average += w * v
wmax = arraycompare(wmax, w, height, width)
sweight += w
average += wmax * imagearray[:, :, i]
average /= wmax + sweight
average_uint8 = average.astype('uint8')
imagearray_NL[:, :, i] = average_uint8
return imagearray_NL
# 播放黑白原视频
def Vedio_play1(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
# 用黑白播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) # 将彩色图像转化成灰度图
cv.imshow("result", gray) #播放每一帧
if cv.waitKey(40) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 每帧进行直方图均衡化并播放视频(黑白)
def Vedio_play2(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
# 用黑白播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) # 将彩色图像转化成灰度图
equ = cv.equalizeHist(gray)
cv.imshow("result", equ) #播放每一帧
if cv.waitKey(40) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 每一帧拼接成图像,并对整个图像进行直方图均衡化,再拆分并播放视频(黑白)
def Vedio_play3(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
index = 0
x, y = frame[:, :, 0].shape
# 处理成大图均衡化后播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
gray = cv.cvtColor(frame, cv.COLOR_BGR2GRAY) # 将彩色图像转化成灰度图
if(index == 0):
res = gray.copy()
else:
res = np.hstack((res, gray.copy()))
index += 1
print("黑白视视频共有" + str(index) + "帧")
equ = cv.equalizeHist(res)
for i in range(index):
temp = equ[0 : x , i * y : i * y + y]
cv.imshow("result", temp)
if cv.waitKey(30) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 播放彩色视频
def Vedio_play4(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
# 播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
cv.imshow("result", frame) #播放每一帧
if cv.waitKey(40) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 彩色视频每一帧进行均衡化
def Vedio_play5(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
# 均衡化处理后播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
b, g, r = cv.split(frame)
equ1 = cv.equalizeHist(b)
equ2 = cv.equalizeHist(g)
equ3 = cv.equalizeHist(r)
equ = cv.merge((equ1, equ2, equ3))
cv.imshow("result", equ) #播放每一帧
if cv.waitKey(40) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 每一帧拼接成图像,并对整个图像进行直方图均衡化,再拆分并播放视频(黑白)
def Vedio_play6(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
index = 0
x, y = frame[:, :, 0].shape
# 处理成大图均衡化后播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
if(index == 0):
res = frame.copy()
else:
res = np.hstack((res, frame.copy()))
index += 1
print("彩色视视频共有" + str(index) + "帧")
b, g, r = cv.split(res)
equ1 = cv.equalizeHist(b)
equ2 = cv.equalizeHist(g)
equ3 = cv.equalizeHist(r)
equ = cv.merge((equ1, equ2, equ3))
for i in range(index):
temp = equ[0 : x , i * y : i * y + y]
cv.imshow("result", temp)
if cv.waitKey(30) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
# 每帧进行非局部均值去噪声并播放视频(彩色)
def Vedio_play7(vc):
# 检查是否正确打开
if vc.isOpened():
# open代表是否读取成功,为bool值,frame为每一帧的图像的三维数组
open, frame = vc.read() # vc.read()代表读取视频的每一帧(从第一帧开始读取)
else:
open = False
# 用黑白播放读取的彩色视频
while open:
ret, frame = vc.read()
if frame is None: # 为空则break
break
if ret == True:
nl = nl_meansfilter(frame)
cv.imshow("result", nl) #播放每一帧
if cv.waitKey(40) & 0xFF == 27: # waitKey的参数代表等待的时间(数值越大,播放的速度越慢) 0xFF代表退出键为27
break
vc.release()
cv.destroyAllWindows()
def main():
# 第一题实现
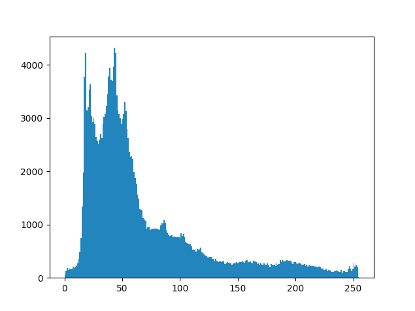
img1 = cv.imread("huajianghu.jpg", 0) #彩色图像变灰度图像
plt.hist(img1.ravel(), 256) # 原图的直方图
plt.show()
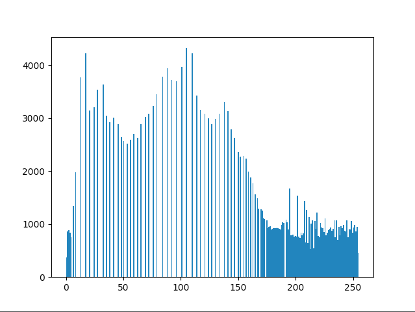
equ = cv.equalizeHist(img1)
plt.hist(equ.ravel(), 256) #均衡化后的直方图
plt.show()
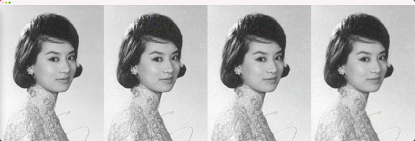
res1 = np.hstack((img1, equ))
cv_show("原图与均衡化的图像", res1)
# 第二题实现
img2 = cv.imread("woman_gray.jpg")
# 分别使用高斯噪声和椒盐噪声
img2_zaosheng1 = noise_Gauss(img2) # 方差为0, 标准差为0.005
img2_zaosheng2 = pepper_and_salt(img2, 0.04) #百分之4的椒盐噪音
#cv_show("1", img2_zaosheng1)
#cv_show("2", img2_zaosheng2)
# 滤波器大小为3
median1_3 = cv.medianBlur(img2_zaosheng1, 3)
median2_3 = cv.medianBlur(img2_zaosheng2, 3)
#滤波器大小为5
median1_5 = cv.medianBlur(img2_zaosheng1, 5)
median2_5 = cv.medianBlur(img2_zaosheng2, 5)
#展示图像
res2_1 = np.hstack((img2, img2_zaosheng1, median1_3, median1_5)) # 横着拼接
res2_2 = np.hstack((img2, img2_zaosheng2, median2_3, median2_5)) # 横着拼接
cv_show("高斯噪声中值滤波", res2_1)
cv_show("椒盐噪声中值滤波", res2_2)
# 第三题实现
img3 = cv.imread("woman_color.jpg")
cv_show("lena'", img3)
img3_zaosheng1 = noise_Gauss(img3) # 方差为0, 标准差为0.005
nl_means1 = nl_meansfilter(img3_zaosheng1)
res3_1 = np.hstack((img3, img3_zaosheng1, nl_means1))
cv_show("1", res3_1)
# 第四题实现
img4 = cv.imread("woman_color.jpg")
# 分别用5,10,20 次添加随机噪声(其实就是扩大添加随机噪声的规模)
img4_5 = random_noise(img4.copy(), 5)
img4_10 = random_noise(img4.copy(), 10)
img4_20 = random_noise(img4.copy(), 20)
res4 = np.hstack((img4, img4_5, img4_10, img4_20))
cv_show("1", res4)
# 第五题实现
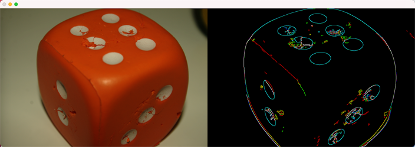
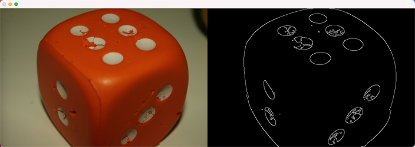
img5 = cv.imread("shaizi.png")
b, g, r = cv.split(img5)
# 采用OpenCV自带的Canny函数进行边缘检测 (50和100代表双阈值检测中的minVal和maxVal)
'''
该方法的流程为:
1.使用高斯滤波器平滑图像
2.计算每个像素点的梯度大小和方向(离散情况下有误差)
3.使用非极大值抑制的方法消除杂散影响
4.应用双阈值检测的方法确定真实和潜在的边缘
5.抑制孤立的弱边缘完成检测
'''
b1 = cv.Canny(b, 50, 100)
g1 = cv.Canny(g, 50, 100)
r1 = cv.Canny(r, 50, 100)
temp1 = cv.merge([b1, g1, r1])
temp2 = cv.merge([b1, b1, b1]) #假设三个通道的值都为blue通道的值
res5_1 = np.hstack((img5, temp1))
res5_2 = np.hstack((img5, temp2))
cv_show("彩色边缘检测", res5_1)
cv_show("三个通道相等时的情况", res5_2) #可见边缘全都变成了白色
# 第六题实现
#1.黑白视频
vc = cv.VideoCapture("test.mp4") # 读取视频
Vedio_play1(vc) # 播放原视频
vc = cv.VideoCapture("test.mp4") # 读取视频
Vedio_play2(vc) #逐帧均衡化并播放视频
#2.彩色视频
vc = cv.VideoCapture("test3.mp4") # 读取彩色视频
Vedio_play4(vc) # 播放彩色视频
vc = cv.VideoCapture("test3.mp4") # 读取彩色视频
Vedio_play5(vc) # 彩色视频逐帧均衡化后播放
# 第七题实现
#1.黑白视频
vc = cv.VideoCapture("test.mp4")
Vedio_play1(vc)
vc = cv.VideoCapture("test.mp4")
Vedio_play3(vc)
#2.彩色视频
vc = cv.VideoCapture("test3.mp4")
Vedio_play4(vc)
vc = cv.VideoCapture("test3.mp4")
Vedio_play6(vc)
'''
结论就是感觉先变成大图均衡化后视频更加流畅了
'''
# 第八题实现
# 第一小问
vc = cv.VideoCapture("test3.mp4")
Vedio_play4(vc) # 播放彩色视频
vc = cv.VideoCapture("test3.mp4")
Vedio_play7(vc) # 逐帧进行非局部去噪声(能实现但实在是太慢了,因为非局部去燥算法本身就很慢,视频需要30秒才能播放一帧)
'''
将其变成大图像也能实现,只要在第六题的基础上修改就ok了
但是没有演示效果(因为非局部均值算法慢成屎了)
'''
#第二小问
'''
实在不会了,看不懂
'''
if __name__ == '__main__':
main()
|